در این آموزش، نحوه استفاده از کنترلر بی سیم پلی استیشن 2 (PS2) و خلبان آردوینو Uno از یک مخزن رباتیک را به شما نشان می دهم.

داستان
در هسته اصلی این پروژه از برد آردوینو Uno استفاده شده است. دستورات را از کنترلر بی سیم دریافت می کند و سرعت موتورها را تنظیم می کند. ممکن است از سایر بردهای توسعه نیز استفاده شود (NodeMCU، Firebeetle و غیره)، و اصول ارائه شده در این آموزش را می توان بر روی مدل های دیگر ربات ها و گجت ها اعمال کرد.
من قبلا یک مخزن رباتیک کنترلشده Blynk PS2 طراحی کردهام. به یک شبکه Wi-Fi متصل می شود و دستورات را از سرور Blynk دریافت می کند. گوشی هوشمندی که برنامه Blynk را اجرا میکند بهعنوان کنترل از راه دور استفاده میشود و از روشهای ورودی مختلفی استفاده میشود: دکمههای فشاری، نوارهای کشویی و حتی شتابسنج گوشیهای هوشمند. در اینجا می توانید اطلاعات بیشتری درباره این پروژه پیدا کنید: https://www.hackster.io/igorF2/wi-fi-controlled-robot-using-wemos-d1-esp8266-and-blynk-464198
من همچنین آزمایش هایی با دستورات صوتی انجام داده ام. اگر میخواهید یک ربات را از راه دور بدون استفاده از دستان خود کنترل کنید، یا اگر میخواهید برای شخصی با حرکات محدود قابل دسترسی باشد، ممکن است مفید باشد. به عنوان مثال، ممکن است به یک صندلی چرخدار رباتیک با کنترل صوتی فکر کنید. یک کیت رباتیک DIY به همراه برخی از ابزارهای مورد علاقه من استفاده شد: Adafruit.io، IFTTT و Arduino IDE. دستورالعمل کامل در اینجا:
https://www.hackster.io/igorF2/wi-fi-voice-controlled-robot-using-google-assistant-79802c
شما می توانید از کیت های مختلف یا حتی طراحی ربات های خود با استفاده از مواد ساده، بدون نیاز به استفاده از ابزارهای پیچیده مانند چاپگرهای سه بعدی و دستگاه های برش لیزری استفاده کنید. شما می توانید یک مثال در یکی از آموزش های قبلی من پیدا کنید:
https://www.hackster.io/igorF2/widc-wi-fi-controlled-fpv-robot-8f1e09
مرحله 1: ابزار و مواد

در این پروژه از ابزارهای زیر استفاده شده است:
آهن و سیم لحیم کاری
- ( لینک / لینک ) . موتورهای DC قبلاً با سیمهای لحیم شده به پایانههای آن عرضه میشدند... اما در نهایت میشکنند و ممکن است مجبور شوید آن را دوباره لحیم کنید. پس در نظر داشته باشید که یک آهن لحیم و سیم خوب در نزدیکی خود داشته باشید.
ورق فوم EVA
- (یا سایر مواد غیر رسانا). شاسی رباتی که من در این پروژه استفاده کردم از آلومینیوم ساخته شده است و بر روی این قطعات فلزی مدار نصب شده است. من از یک لایه ورق فوم بین تخته ها و صفحه فلزی استفاده کردم تا از اتصال کوتاه احتمالی جلوگیری کنم.
نوار دو طرفه
- برای چسباندن ورق های فوم به تخته های مدار و برای نصب ماژول H-Bridge استفاده شد.
- قیچی برای برش چند مستطیل ورق فوم.
من از قطعات سخت افزاری زیر برای پروژه خود استفاده کردم:
برد توسعه دهنده مبتنی بر آردوینو Uno
- ( پیوند / پیوند / پیوند / پیوند) . به عنوان کنترل کننده اصلی ربات استفاده می شود. استفاده و برنامه نویسی با Arduino IDE واقعاً آسان است و برای مبتدیان در زمینه الکترونیک و برنامه نویسی عالی است.

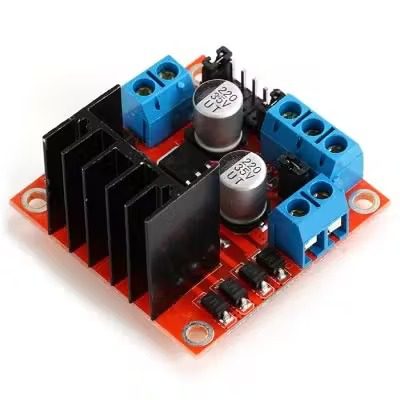
ماژول پل H دو کاناله L298N
- ( پیوند / پیوند / پیوند / پیوند) . این ماژول به سیگنال های 3.3 ولتی Wemos (یا آردوینو) اجازه می دهد تا به 12 ولت مورد نیاز برای موتورها تقویت شوند.
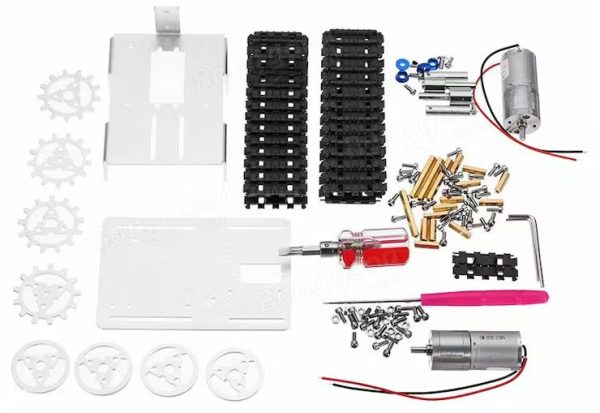
تانک شاسی ربات DIY
- ( لینک) . این کیت عالی با همه چیزهایی که برای ساختن یک مخزن نیاز دارید دارد: دو موتور DC، چرخ دنده، تراک، پیچ و مهره، مهره و غیره. در حال حاضر با ابزار مورد نیاز برای مونتاژ شاسی همراه است که برای مبتدیان عالی است!