

این پروژه برای ساخت رباتی طراحی شده است که به طور خودکار مانع سر راه خود را تشخیص می دهد و هر زمان که مانعی از پیش رویش می آید، خود را هدایت می کند. این وسیله نقلیه رباتیک با استفاده از برد آردوینو UNO ساخته شده است. سنسور اولتراسونیک برای تشخیص هر مانعی که در مقابل آن قرار دارد استفاده می شود. یک آی سی درایور موتور و 2 موتور DC برای کنترل حرکت ربات استفاده می شود. در این پروژه از موتور سروو نیز استفاده شده است. سپس سنسور اولتراسونیک بر روی سروو نصب می شود و با چرخش سروو به زوایای مختلف، خوانش سنسور اولتراسونیک را در آن زوایا بدست می آوریم. این به کنترلر کمک می کند تا مسیر دقیق پیمایش را تشخیص دهد. یک ماژول بلوتوث نیز به پروژه اضافه شده است (که اختیاری است) تا زمانی که ربات در حالت دستی است، از گوشی اندرویدی خود کنترل کنید.
اهداف پروژه
- با اجتناب از موانع پیش رو با خیال راحت حرکت کنید.
- تشخیص مسیر دقیق با بررسی قرائت سنسور در زوایای مختلف.
- هنگامی که ربات در حالت خودکار است، وضعیت حرکت ربات (با استفاده از ماژول بلوتوث) را به تلفن اندرویدی نزدیک ارسال کنید.
- با دریافت سیگنال از تلفن در حالت دستی حرکت کنید.
بیایید شروع به ساخت پروژه خود کنیم - ربات جلوگیری از موانع
مدار
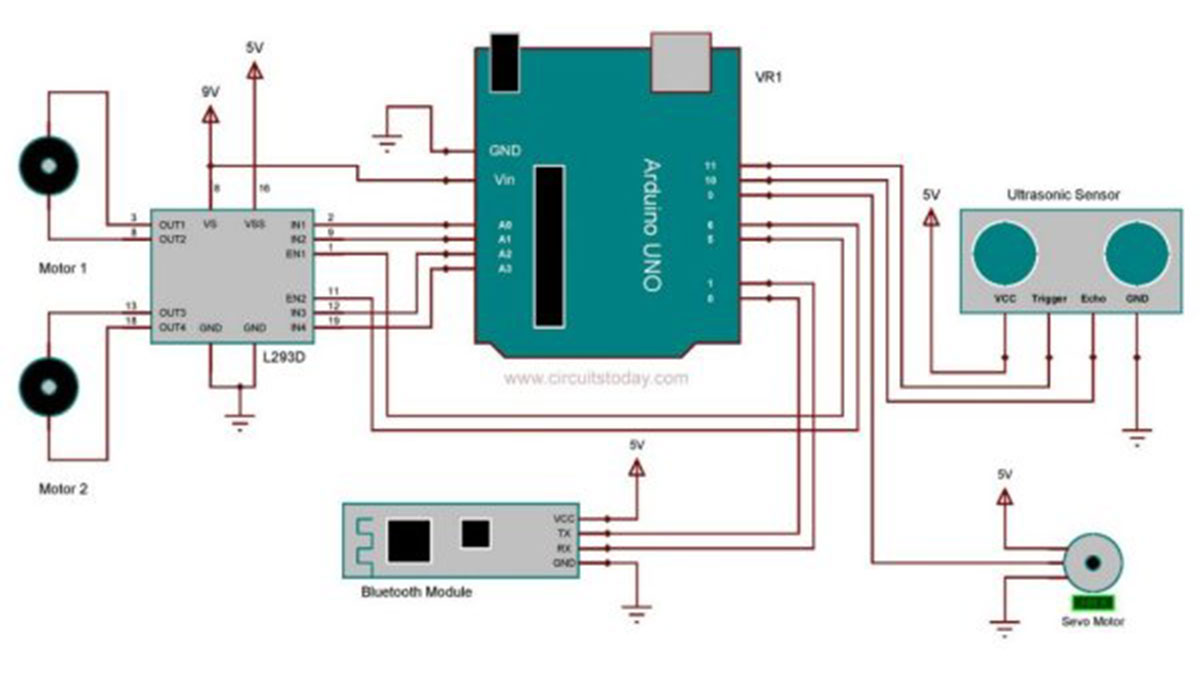
مدار را همانطور که در نمودار نشان داده شده است جمع کنید! اتصالات مهم در زیر توضیح داده شده است.
HC SR04 سنسور اولتراسونیک است که ما در اینجا از آن استفاده می کنیم. سنسور اولتراسونیک دارای 4 پین Vcc، Trig، Echo و Gnd است. Vcc و Gnd به پایه های تغذیه آردوینو متصل هستند. Trig به پایه یازدهم و Echo به پایه دهم آردوینو متصل است.
همانطور که قبلا ذکر شد یک آی سی درایور موتور به نام L293D برای کنترل موتورهای DC استفاده می شود. این یک آی سی 16 پین است که می تواند دو موتور را به طور همزمان به حرکت درآورد. پایه 1 و 9 پایه های فعال هستند که به پایه های 5 و 6 برد آردوینو متصل می شوند. پایه های 2 و 7 ورودی های کنترل میکروکنترلر برای موتور اول هستند. آنها به ترتیب به پایه های A0 و A1 آردوینو متصل می شوند. به طور مشابه، پایه های 10 و 15 ورودی های کنترلی از میکروکنترلر برای موتور دوم هستند. آنها به پایه های A2 و A3 آردوینو متصل می شوند.
هنگامی که ربات روشن است، هم موتورهای ربات کار می کنند و هم ربات به جلو حرکت می کند. در این مدت سنسور اولتراسونیک به طور مداوم فاصله بین ربات و مانع روبروی آن را محاسبه می کند. اگر فاصله بین ربات و مانع کمتر از 30 سانتی متر باشد، ربات از حرکت باز می ایستد و سنسور را با استفاده از موتور سروو می چرخاند تا در زوایای مختلف قرائت شود. چرخش صحیحی که قرار است انجام شود را می توان با بررسی زاویه ای که سنسور حداکثر خواندن را در آن می دهد، تعیین کرد. این مسیری با مانع کمتر خواهد بود. سروو موتور دارای یک خط سیگنال است که به پایه نهم آردوینو متصل است . چرخش سروو با تولید سیگنال pwm در خط سیگنال آن انجام می شود.
یک ماژول بلوتوث به نام HC05 نیز در این پروژه استفاده شده است (اختیاری). به پین های RX و TX آردوینو متصل است. در اینجا برای کنترل ربات با تلفن اندرویدی شما استفاده می شود. ما یک برنامه اندرویدی ساده برای این کار توسعه دادیم. فایل apk. اپلیکیشن به همراه این مقاله پیوست شده است. به سادگی می توانید آن را دانلود و بر روی گوشی خود نصب کنید. با استفاده از برنامه، می توانید با یک کلیک ربات را به حالت خودکار یا دستی تغییر دهید. و همچنین وضعیت ربات را در حالت خودکار نشان می دهد.
بیشتر بخوانید: ربات با استفاده از آردوینو و ماژول بلوتوث (ربات جلوگیری از موانع)
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
This project is designed to build a robot that automatically detects the obstacle on its path and guides itself whenever an obstacle comes ahead of it. This robotic vehicle is built, using Arduino UNO board. An ultrasonic sensor is used to detect any obstacle ahead of it. A motor driver IC and 2 DC motors are used for controlling the movement of the robot. A servo motor is also used in this project. The ultrasonic sensor is then mounted on the servo and by rotating the servo to different angles we will obtain the readings from the ultrasonic sensor in those angles. This will help the controller to detect the exact path to navigate. A Bluetooth module is also added to the project (which is optional ) in order to control the robot from your android phone when it is in manual mode.
