

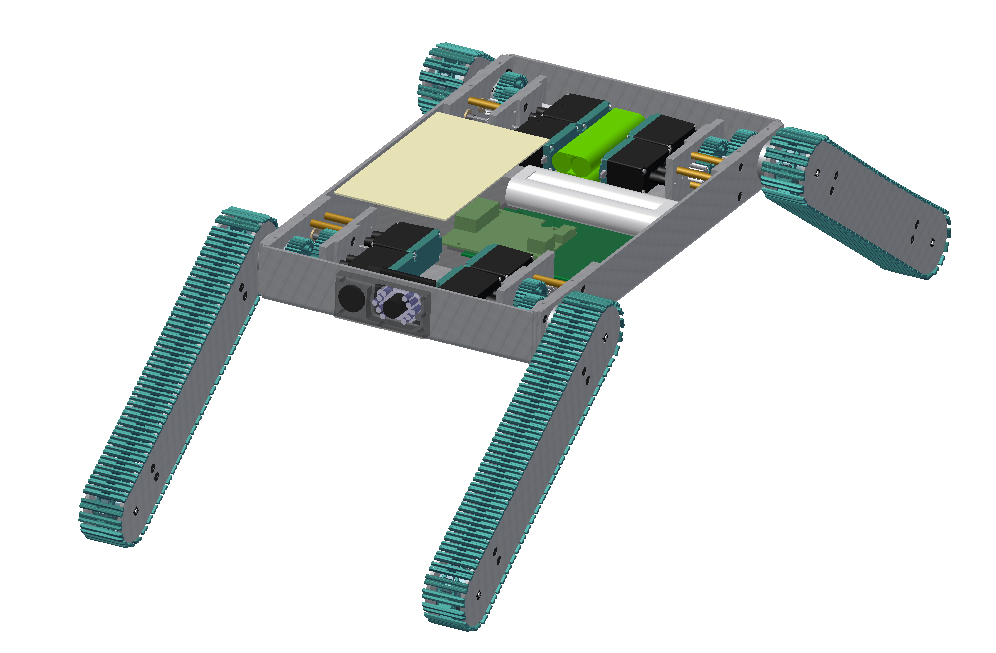
نمونه اولیه نهایی شده
در زیر نمونه اولیه نهایی نشان داده شده است. هدف از نمونه اولیه نشان دادن امکان سنجی یک ربات جستجو و نجات کوچک با قابلیت مانور بالا بود. به این ترتیب، نمونه اولیه تکمیل شده موفقیت آمیز بود. سرعت زمین 10 اینچ در ثانیه، عمر باتری 50 دقیقه، برد بی سیم بین 50 تا 150 فوت (بسته به تداخل)، وزن 14.5 پوند و توانایی بالا رفتن از پله ها از جمله قابلیت های آن است. نمونه اولیه همچنین قادر به عبور از یک شکاف حداقل 10 اینچی و بالا رفتن از سطح شیبدار بلند 21 اینچی با زاویه 49 درجه از افقی است. یک فید تصویری رنگی (با روشنایی شبانه) و ارتباط صوتی دو طرفه را در اختیار اپراتور قرار می دهد.
سنسورهای چرخش بازو
این ربات همچنین دارای 4 حسگر موقعیت بازو برای نشان دادن جهت هر پا نسبت به بدن است. حسگرها مشابه پتانسیومترها با یک تکه کاغذ مقاومتی C شکل طراحی شده اند. با چرخش بازو، بین کاغذ مقاومتی و ترمینال خروجی تماس برقرار می کند. ولتاژ خروجی با ورودی های آنالوگ آردوینو اندازه گیری می شود.
اولین تست کاملا بی سیم
این دومین آزمایش بزرگ نمونه اولیه بود، اولین آزمایش کاملاً بدون اتصالات خارجی انجام شد. باز هم لپ تاپ مورد استفاده برای ارسال دستورات و مشاهده فید دوربین (و همچنین ارسال و دریافت صدا) نشان داده نمی شود. این آزمایش مشکلات نرم افزاری و سخت افزاری بیشتری را نشان داد که در حال بررسی هستند.
تست برد بی سیم خط دید
با راه اندازی ربات در پیکربندی نشان داده شده در ویدیوی بالا، تیم محدوده بی سیم خط دید را آزمایش کرد. این تیم توانست ربات را در فاصله تقریباً 160 فوتی کنترل کند. آزمایشات بیشتری برای تجزیه و تحلیل تأثیر تداخل ساختاری برنامه ریزی شده است.
اولین تست کامل موتور با کنترل بی سیم
این اولین آزمایش بزرگ نمونه اولیه بود. 6 موتور از 8 موتور متصل شدند (همه به جز چرخش جلو چپ و ترجمه). برخی از باگ های نرم افزاری در این آزمایش کشف شد و در حال رفع است. لپ تاپ به صورت بی سیم به رباتی که برای کنترل موتورها استفاده می شود، نشان داده نشده است. همچنین توجه داشته باشید که دوربین با یک فید ویدیویی کار می کند که به رایانه رومیزی نشان داده شده در ویدیو ارسال می شود.
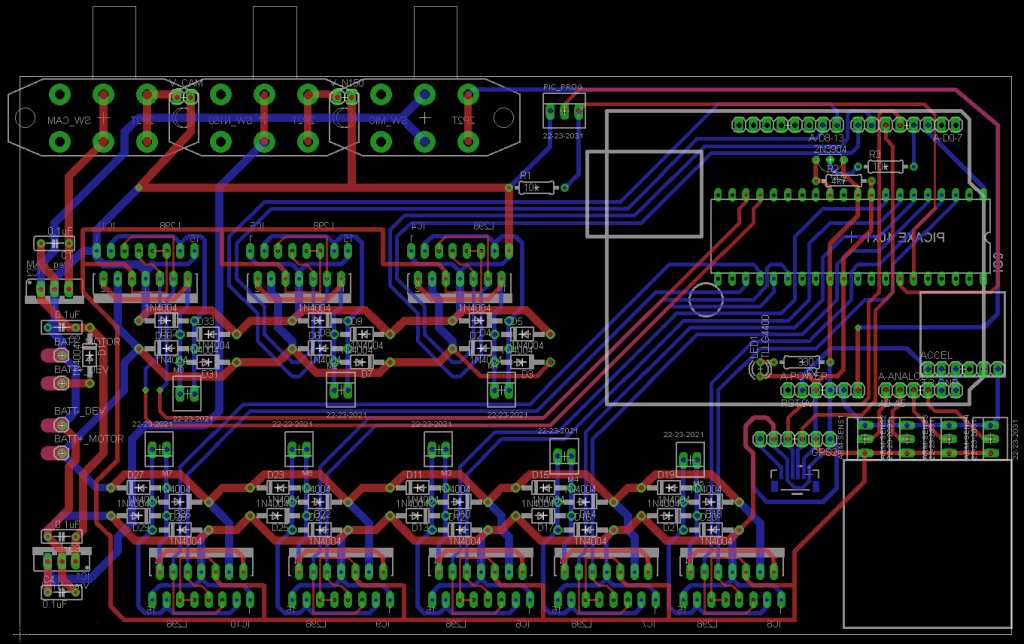
نشان داده شده در بالا، برد کنترل کننده موتور متصل به میکروکنترلر آردوینو است. این برد دارای یک شتاب سنج (مربع قرمز در تصویر اول)، یک کانکتور برای GPS (کانکتور کوچک پایین سمت چپ)، هشت درایور موتور با قابلیت کنترل جداگانه و مدار تنظیم قدرت است. بیشتر درایورهای موتور توسط یک آی سی افزایش دهنده خروجی اضافی هدایت می شوند.
درایورهای موتور و تنظیم کننده های ولتاژ به صورت خطی هستند به طوری که ممکن است دو هیت سینک به هم متصل شوند. همچنین یک کابل اترنت برای اتصال آردوینو به سپر اترنت نشان داده شده است.
برای جزئیات بیشتر: ربات جستجو و نجات بسیار قابل مانور
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Finalized Prototype
Shown below is the finalized prototype. The purpose of the prototype was to demonstrate the feasibility of a small, highly maneuverable search and rescue robot. As such, the completed prototype was successful. Capabilities include a ground speed of 10 inches per second, battery life of 50 minutes, wireless range of between 50 and 150 feet (depending on interference), weight of 14.5 pounds and the ability to climb stairs. The prototype is also capable of crossing a gap of at least 10 inches and of climbing a 21 inch tall ramp angled at 49 degrees from horizontal. It provides the operator with a color video feed (with nighttime illumination) and two-way audio communication.
