

در این پروژه ساخت ربات هایی را که در حالت تعادل با آردوینو ایستاده اند توضیح خواهم داد. ما در نسخه قبلی خود از پروژه کنترل شده اندروید توضیح دادیم. در این پروژه ما به کنترل خود خواهیم رفت. بیا برویم تا به پروژه ساختمان خود برسیم.
مرحله 1: مواد:
- آردوینو یونو یا مگا
- کارت راننده موتور L298
- پتانسیومتر 3 تکه
- می توانید صفحه پلکسی گلاس را برای ظروف پلاستیکی مکانیکی یا سفت برش دهید.
- 4 عدد میله پیچ به طول حدود 20 سانتی متر
- مهره 24 تیکه
- 2 عدد موتور 6 ولت DC در 250 دور در دقیقه (که همراه با چرخ ها)
- باتری لیپو
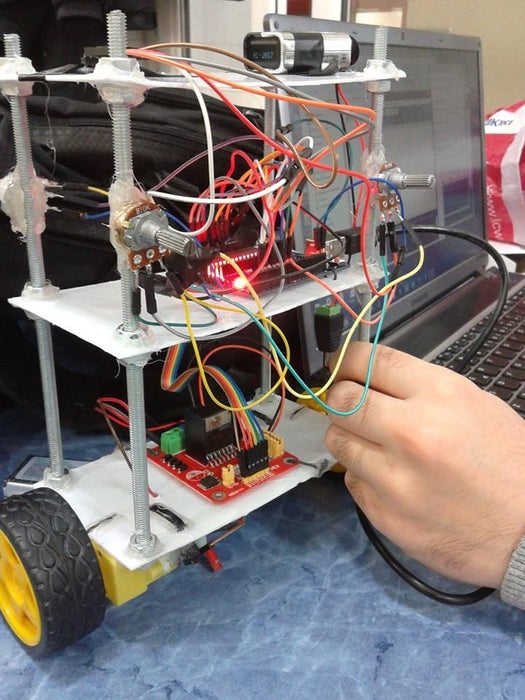
مرحله 2: مکانیک:
صفحه پلکسی سه گانه 20 × 8 سانتی متر. می توانید در اندازه های مختلف برش دهید. قطر میله پیچ را از سوراخ تا زمانی که گوشه هر ورق باز شود برش دهید. هر صفحه به طوری که میله بین دو مهره و پیچ و مهره ها را نصب کنید. اجازه دهید یکدیگر را برابر با فاصله بین صفحات در نظر بگیریم. موتور سپس راه ما به سمت راست و سمت چپ پایین صفحه درست در مرکز سیم آهنی متصل به سیلیکون لایال من قرار خواهد گرفت. چنین قطعات مکانیکی.
مرحله 3: بخش الکترونیکی:
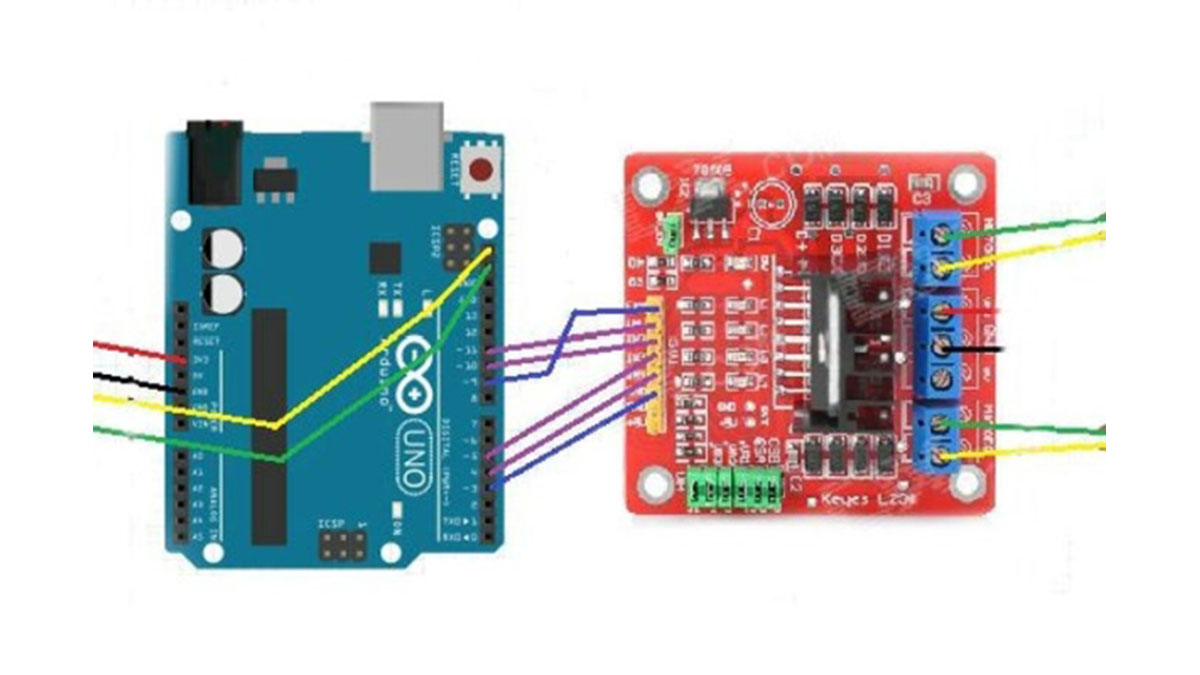
ما از موتوری که در یک درایو موتور سنکرون کار میکند با کتابخانه خاص خود استفاده میکنیم. به این ترتیب، اتفاقاً اشتباهات در کار موتور با سیستم داده کامل به حداقل میرسد.
ما جنبه مثبت باتری را به ورودی برق 12 ولتی موتور LiPo روی درایو می دهیم. ما انتهای منهای ورودی GND را قرار می دهیم.
علاوه بر ویژگی مدار به 3 واحد 0.1 پتانسیومتر آنالوگ سال و 2 پین. در اینجا وظیفه پتانسیومتر kPa، تنظیم دستی مقادیر kd و به ما امکان می دهد نقطه تعادل بهینه ربات را پیدا کنیم. سنسور ژیروسکوپ Mpu6050 نصب شده بر روی صفحه پایین به صورت افقی اجازه دهید.
بیشتر بخوانید: ربات خود متعادل کننده آردوینو
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
In this project I will describe the construction of robots standing in equilibrium with Arduino.We explained in our previous version of the android controlled project. In this project we will move to our control. Let’s go let’s get to our building project.
Step 1: Materials:
- Arduino Uno or Mega
- L298 Motor Driver Card
- 3 Piece potentiometer
- You can cut plexiglass plate for mechanical or rigid plastic containers.
- 4 pieces of screw rods in length of about 20 cm
- 24-Piece Nut
- 2 pieces 6V DC motors at 250 rpm (from which together with the wheels)
- Lipo battery
Step 2: The Mechanics:
20 × 8 cm three plexiglass plate final.You can cut in different sizes. Cut diameter of the screw rod through the hole until after the corner of each sheet’s open. Each plate so that the rod between two nuts and bolts Let’s mounting screws. Let us consider each other to be equal to the gap between the plates. The engine then our way to the bottom right and left sides of the plate will be located right in the center of iron wire tied to my silikonlayal. Such mechanical parts.
Step 3: Electronic Section:
