

معرفی
ایده این پروژه طراحی و ساخت رباتی بود که متشکل از یک بدنه و دو چرخ است که به تنهایی قادر به حفظ تعادل باشد. این رفتار شبیه نحوه عملکرد یک سگ وی (شیوه جدید حمل و نقل) است. هدف ما این بود که یک محصول کارآمد داشته باشیم – روباتی که بدون تعامل انسانی بتواند روی دو چرخ تعادل برقرار کند.
سطح بالا - طراحی فیزیکی
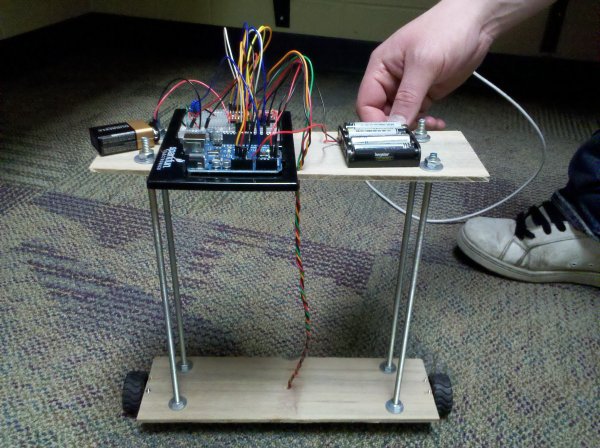
طراحی این پروژه در نگاه اول نسبتا ساده است. از نظر فیزیکی بدنه ای را در نظر گرفتیم که از دو سکوی جدا شده و با چهار میله رزوه ای در جای خود قرار گیرد. پلت فرم پایین به سادگی برای نگه داشتن چرخ ها در جای خود است. قسمت بالایی میکروکنترلر و سخت افزار پشتیبانی را نگه می دارد (که در ادامه به آن پرداخته خواهد شد). وزن نزدیک به بالا به ثابت نگه داشتن ربات کمک می کند، بنابراین چرخ ها می توانند به تدریج واژگونی را اصلاح کنند.
سطح بالا - طراحی رابط میکروکنترلر
برای ایجاد تعادل Theobald، ما به دو چیز اساسی در محاسبات به غیر از خود میکروکنترلر نیاز داریم - ورودی و خروجی. ورودی ما شامل چیزی است که می تواند حس کند ربات در چه زاویه ای نسبت به زمین قرار دارد. چند کار می تواند این کار را انجام دهد: ما می توانیم با استفاده از حسگرهای فاصله مادون قرمز یا فاصله یاب های مافوق صوت فواصل یک طرف ربات را تا زمین پیدا کنیم، یا می توانیم از ترکیب و شتاب سنج و ژیروسکوپ برای بدست آوردن زاویه نسبت به زمین استفاده کنیم. اینطوری تصحیح کن سپس ما نیز به خروجی نیاز داریم. این به شکل دو موتور ما است که سعی می کنند ربات در حال سقوط را اصلاح کنند. برای کنترل دو موتور بدون ایجاد کنترلکنندههای موتور پل h خودمان، به یک درایور موتور با قابلیتهای زیر نیاز داریم: رابط با میکروکنترلر، خروجی به دو موتور، و قابلیت حرکت در جهت عقربههای ساعت و خلاف جهت عقربههای ساعت.
توزیع وظایف اعضا
این پروژه به صورت کاملاً مشارکتی انجام شد. ساخت اصلی تئوبالد (تا فریم) توسط اتان تکمیل شد زیرا او در واقع در حال ساخت یک خانه سگ بود و تمام تجهیزات و مواد را در دست داشت. پس از تکمیل قاب، همه اعضا به طور مشترک قطعات را مونتاژ کردند، لحیم کردند، تحقیق کردند، توسعه دادند، اجرا کردند، آزمایش کردند و دوباره پیاده سازی کردند. پس از اتمام، بخش عمده ای از این صفحه وب توسط ایتان تکمیل شد در حالی که زک و تونی روی ارائه ما کار می کردند.
سخت افزار – میکروکنترلر ( Arduino Uno )
میکروکنترلری که ما استفاده کردیم Arduino Uno است که بر روی میکروکنترلر ATMega328 ساخته شده است. آردوینو بردی را میسازد که از این میکروکنترلر استفاده میکند و رابطهای مفیدی مانند جک برق، ساعت 16 مگاهرتزی، اتصال USB و نقاط مناسب برای اتصال سیمها به آن میدهد. برای دریافت تمام مشخصات آردوینو Uno به لینک مراجعه کنید.

سخت افزار – IMU ( SEN-10121 )
این ترکیب شتابسنج/ژیروسکوپ (که اغلب واحد اندازهگیری اینرسی یا IMU نامیده میشود) بسیار راحت است که دو دستگاه خوب را ترکیب میکند و در صورت درخواست از یک رابط سریال برای خروجی استفاده میکند. اگر خروجی در عوض آنالوگ بود، برای دریافت یک مقدار دیجیتال که تنها 10 بیت دقت دارد، به مبدل آنالوگ به دیجیتال ATMega328 بستگی دارد.
برای جزئیات بیشتر: ربات خود متعادل کننده با استفاده از آردوینو
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Introduction
The idea of this project was to design and construct a robot that consists of a body and two wheels that would be able to balance on its own. This behavior is similar how a segway (a new mode of transportation) works. Our goal was to have a working finished product – a robot that, without human interaction, could balance on two wheels.
