

این یک راهنمای گام به گام برای ساخت یک ربات ناوبری مستقل است. برای کنترل این ربات از میکروکنترلر آردوینو استفاده می کنیم. ما دو برنامه متفاوت برای این ربات داریم. اولی ربات را قادر میسازد تا در اطراف رانندگی کند و از هر چیزی که سر راهش قرار میگیرد اجتناب کند. این برنامه اجتناب از موانع از دو حسگر اولتراسونیک استفاده می کند. برنامه دیگر ما از آرایه های دو بعدی برای ترسیم نقشه منطقه اطراف استفاده می کند. بر اساس مقادیری که در آرایه دو بعدی وارد می کنیم، ربات می داند که چیزهای اطراف آن کجا هستند. هر دو برنامه گنجانده شده است.
مرحله 1: مواد
ما از vex به عنوان قاب ربات خود استفاده کردیم، اما شما می توانید از هر چیزی که می خواهید برای ساخت این سازه استفاده کنید. در واقع توصیه می کنیم قاب را از ابتدا بسازید. ما همچنین از سنسورهای Vex و موتورهای vex استفاده می کنیم، اما حتی اگر از سنسورها و موتورهای دیگر استفاده کنید (که توصیه می کنیم انجام دهید) تقریباً دقیقاً به همان روش کار می کند.
- (2) سنسورهای اولتراسونیک (4 برای توانایی نقشه برداری بیشتر یا فقط برای سرگرمی  )
)
- (4) سروو (5 برای سرگرمی ها)
- آردوینو (ما از Uno استفاده کردیم)
- برد Perf (ما از Radio Shack 276-150 استفاده کردیم: http:/ /www.radioshack.com/product/index.jsp?productId=2102845)
– تعداد زیادی سیم
– (2) باتری 9.6 ولتی (ما از باتری های Vex استفاده کردیم: http://www.vexrobotics.com/276-2220.html)
- (1) باتری 9 ولت (برای تامین انرژی آردوینو)
- (4) چرخ (قطر 5 اینچ)
- انواع سخت افزار (مهره، پیچ و مهره و غیره)
- نوار چسب نیز بسیار مفید است
این آموزش سه مرحله دیگر دارد.
بخش اول در مورد جنبه مکانیکی است.
بخش دوم در مورد جنبه الکترونیکی است.
بخش سوم در مورد برنامه نویسی است.
مرحله 2: مکانیکی
ابتدا باید یک پایه محکم بسازیم. ما تصاویر را در اینجا ضمیمه کرده ایم، اما شما می توانید آن را تقریباً هر طور که می خواهید بسازید. ما سه نمونه اولیه از این ربات ساختیم. ما در اینجا به دو مورد اول خواهیم پرداخت. مارک من شکلی شبیه کامیون داشتم. خیلی بزرگ بود، اما همین باعث میشد که کندتر و سختتر بچرخد. همچنین، برای اهداف ما، اندازه تقریباً غیر ضروری بود. بنابراین، در مدل دوم خود، آن را بسیار کوچکتر و جمع و جورتر کردیم.
در مرحله بعد، باید سرووها را زیر پایه اضافه کنیم تا فضای بیرونی کافی برای اتصال چرخ ها وجود داشته باشد. ما از چهار چرخ متحرک استفاده کردیم. بسته به اینکه سرووهای شما چقدر قوی هستند، در صورت تمایل می توانید از دو چرخ متحرک استفاده کنید. با این حال، باید فضای کافی در بالای پایه وجود داشته باشد تا بتوان آردوینو، PCB و باتری را جا داد.
بعد، چرخ ها را به سرووها اضافه کنید، ما تقویت کننده هایی را در خارج از چرخ ها اضافه کردیم تا طرف دیگر شفت را محکم کرده و از جدا شدن آنها جلوگیری کنیم. دو چرخ اضافی در جلو بهگونهای بلند شدهاند که اگر ربات به حاشیه یا پله برخورد کند، میتواند از بالای آن بالا برود. روی دو چرخ عقب نوار چسب میزنیم تا اصطکاک کمتر بشه تا راحت تر بچرخه.
بعد، یک نگهدارنده باتری اضافه کردیم. برای ما آسان بود که یک شارژر باتری Vex را برداریم و آن را هک کنیم تا به جای شارژ باتری، نیرو را به چرخ ها منتقل کند. برد مدار داخل آن را بیرون بیاورید و سیم های مثبت و منفی را که به درگاه شارژ می روند، جدا کنید. سپس سیمهای مشکی دو پایانه باتری را به هم وصل میکنید و سیمهای قرمز را نیز به هم لحیم میکنید. بعد، هر کدام یک سیم را به سیم قرمز و مشکی لحیم کنید. این می تواند مستقیماً به PCB شما وصل شود. تصاویر این نگهدارنده باتری در زیر قسمت الکترونیک قرار دارد.
سپس، یک پایه در جلوی ربات برای حسگرهای اولتراسونیک بسازید. اگر میخواهید بالاتر و فراتر بروید، میتوانید یک پایه برای سنسور اولتراسونیک دوار در مرکز بسازید.
ما تصاویری از طرح Mark II خود را که یک چهار چرخ متحرک استاندارد است و همچنین طرح Mark III خود را که دارای طراحی چرخ خرچنگ است، قرار داده ایم. چرخ خرچنگ برای برنامه ریزی پیچیده تر است، اما درایو هولونومیک را فعال می کند.
مرحله 3: الکترونیک
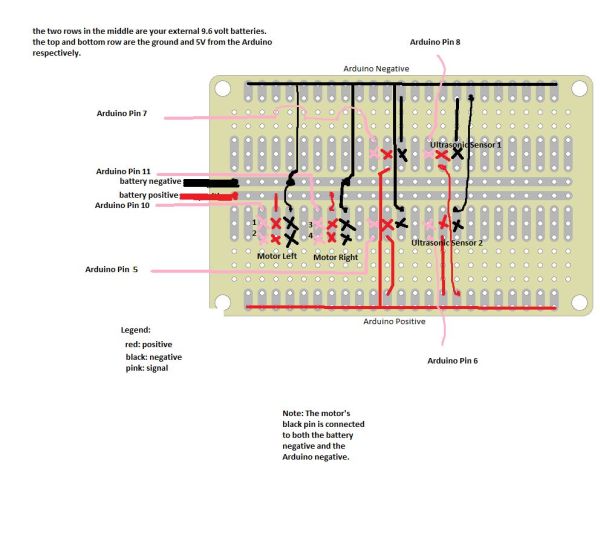
لوازم الکترونیکی این ربات چندان سخت نیست. اگر از ایده نگهدارنده باتری از بالا استفاده می کنید، 9.6 شما باید به صورت موازی متصل شود. اگر از این ایده استفاده نمی کنید، باتری های خود را به صورت موازی وصل کنید. سپس، تصویر برد مدار ارسال شده در اینجا را دنبال کنید. با این حال، مراقب باشید زیرا بسته به اندازه پایه شما، سیم های سروو شما ممکن است نتوانند به برد مدار برسند. ما از سیم سیگنال یکسانی برای سرووهای 1 و 2 و سیم سیگنال متفاوتی برای سرووهای 3 و 4 استفاده می کنیم. این به این دلیل است که سرووهای 1 و 2 باید همیشه سیگنال یکسانی داشته باشند در حالی که سرووهای 3 و 4 باید همیشه سیگنال یکسانی داشته باشند (زیرا آنها در یک طرف هستند).
