

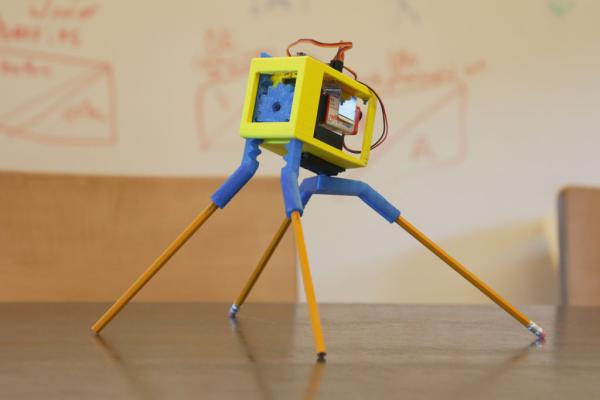
نکته خوب در مورد پرینت سه بعدی این است که ساخت ربات ها را آسان می کند. شما میتوانید هر پیکربندی از قطعاتی را که میتوانید رویاپردازی کنید، طراحی کنید و تقریباً بلافاصله آنها را در دستان خود داشته باشید. این امکان نمونه سازی و آزمایش سریع را فراهم می کند. این ربات پرینت سه بعدی خاص نمونه ای از آن است.
این ایده برای داشتن یک ربات واکر که مرکز جلویی تعادل خود را تغییر میدهد، ایدهای است که چند سالی است داشتم. با این حال، اجرای آن با قطعات خارج از قفسه همیشه بسیار مشکل بود و من را از تلاش واقعی باز داشت. با این حال، وقتی متوجه شدم که این کار را می توان به سرعت و به راحتی با پرینت سه بعدی انجام داد، در نهایت توانستم این ربات را در حدود دو روز بسازم. اساساً پرینت سه بعدی به من این امکان را داده بود که در کمتر از 48 ساعت ایده ای را در نظر بگیرم و به واقعیت تبدیل کنم.
اگر میخواهید تلاش خود را در ساخت این ربات آسان امتحان کنید، من فایلها و دستورالعملهایی را برای شما قرار دادهام تا خودتان آن را بسازید. این قطعاً یک پروژه آخر هفته سرگرم کننده برای افرادی است که دارای چاپگر سه بعدی هستند که کمی در مورد الکترونیک و لحیم کاری می دانند تا پاهای خود را با رباتیک خیس کنند.
مرحله 1: قطعات ربات
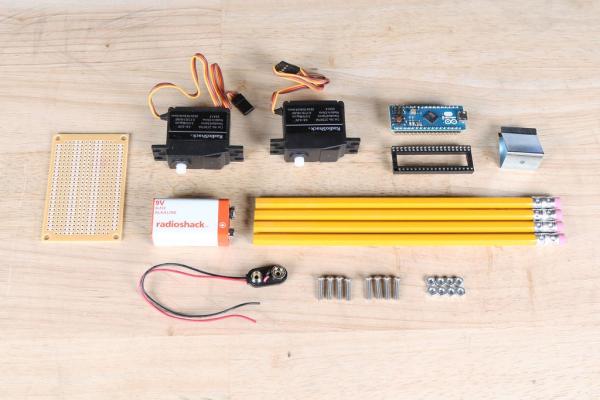
مواد زیر را دریافت کنید:
(x1) چاپگر سه بعدی Afinia ( RadioShack #277-224 )
(x2) سرووهای استاندارد ( RadioShack #273-766 )
(x1) Micro Arduino ( RadioShack #276-258 )
(x1) سوکت 40 پین ( RadioShack #276-19 )
(x1) PCB ( RadioShack #276-150 )
(x1) گیره باتری 9 ولت ( RadioShack #270-324 )
(x1) نگهدارنده باتری 9 ولت ( RadioShack #270-326 )
(x1) باتری 9 ولت ( RadioShack #23-2209 )
(x2) هدر 3 پین ( RadioShack #276-266 )
(x13) مهره و پیچ و مهره M3
(x4) مداد
مرحله 2: قطعات پرینت سه بعدی

فایل های پیوست شده را با استفاده از چاپگر سه بعدی خاص خود پرینت سه بعدی کنید. ممکن است لازم باشد فایل ها را برای کار با پشتیبانی از تنظیمات خاص خود تنظیم کنید.
مرحله 3: مونتاژ جلو

چهار پیچ را در قسمت جلوی ربات قرار دهید.
دو چرخ دنده پای جلو را به داخل محفظه در جلوی بدنه ربات بلغزانید به طوری که سوکت های پا به سمت بیرون باشند.
دنده را بین دو چرخ دنده قفسه پاها قرار دهید.
شات درایو سروو را به سوکت چرخ دنده مرکزی فشار دهید و از یک پیچ برای محکم کردن آن در جای خود استفاده کنید.
در نهایت، سروو را با استفاده از پیچهایی که قبلاً نصب شدهاند، بچسبانید تا مونتاژ جلو تکمیل شود.
بیشتر بخوانید: ربات چاپ سه بعدی
