

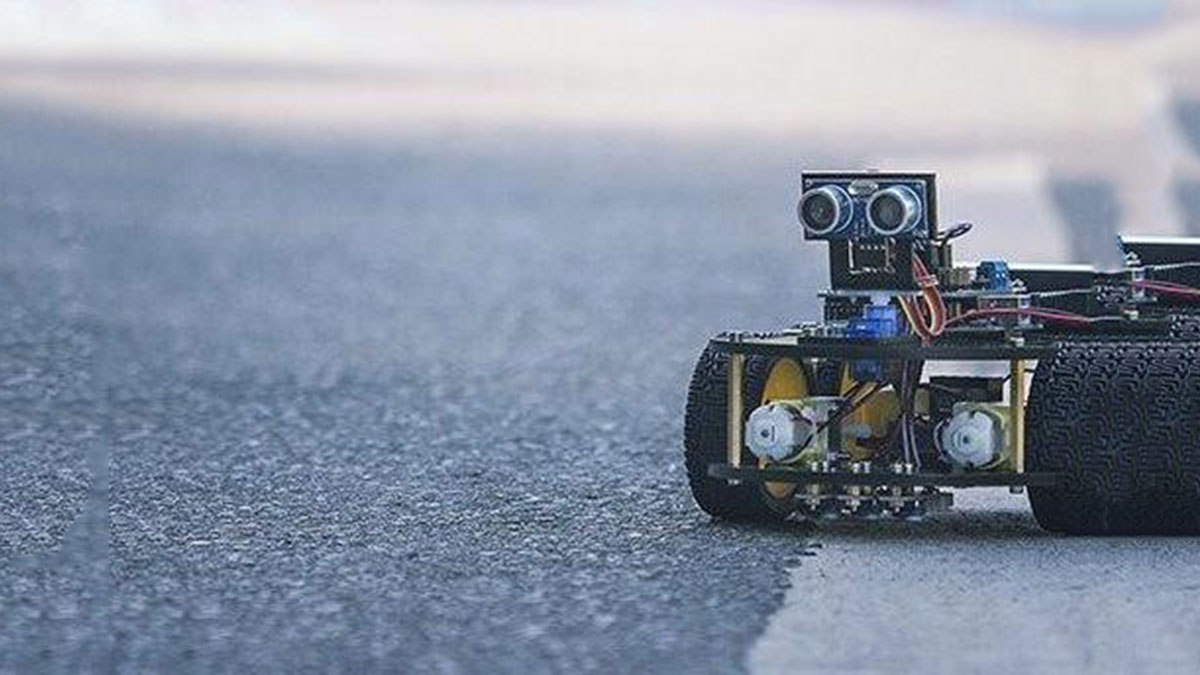
ربات فالوور خط یک ربات مفید است که در انبارها، صنایع و فروشگاهها و غیره استفاده میشود، جایی که مسیر اختصاصی را طی میکند. ربات ارائه شده موقعیت خط را با سنسورهای IR ثبت می کند. اگر ربات از خط خارج شود، دوباره به خط برمی گردد . همچنین، زمانی که نقطه طراحی شده ظاهر می شود، متوقف می شود. من از روش دستکاری پورت مستقیم (تنظیم مستقیم پین های خروجی) به جای استفاده از توابع دیجیتالWrite() پیش فرض آردوینو استفاده کردم. استفاده از روش دستکاری پورت در برنامه نویسی باعث ایجاد فضای بیشتر در فایل HEX و سرعت بیشتر در هنگام اجرای کد می شود.
مثلا:
بیایید به مثال چشمک زدن نگاه کنیم، این اطلاعات از Arduino IDE است
Sketch از 928 بایت (2%) فضای ذخیره سازی برنامه استفاده می کند. حداکثر 32256 بایت است.
اکنون با استفاده از مثال مشابه زیر (دستکاری پورت)
<p>#include <br>#include
void setup()
{
DDRB = B11111111;
}
void loop()
{
PORTB = PORTB | 0x20; // Writes PORTB5 low
_delay_ms(500);
PORTB = PORTB & 0xDF; // Writes PORTB5 high
_delay_ms(500);
}</p>
طرح فوق از 488 بایت (1%) فضای ذخیره سازی برنامه استفاده می کند. حداکثر 32256 بایت است.
شکل بالا را ببینید ( بین دو طرح مشابه مقایسه کنید).
یک مقدمه عالی را در https://www.arduino.cc/en/Reference/PortManipulat ببینید…
اطلاعات بیشتر در مورد دستکاری پورت مستقیم، با استفاده از پورت های دیجیتال [آموزش قسمت 3]
اطلاعات بیشتر در مورد ریاضیات Bitwise و عملگرهای منطقی [آموزش قسمت 4].
مرحله 1: اجزای مورد نیاز
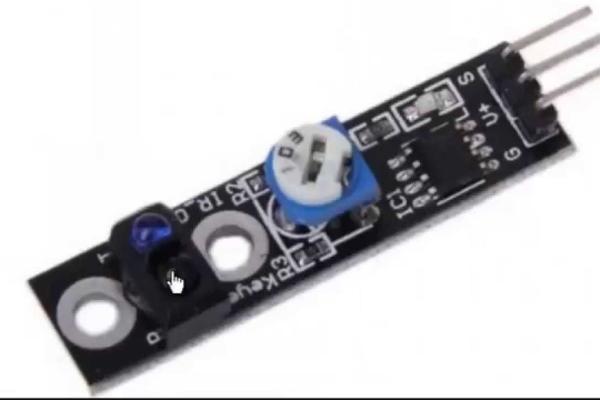
لیست اجزاء:
