

رباتها نقش مهمی در اتوماسیون در تمام بخشهای ساختمانی، نظامی، پزشکی، تولیدی و غیره ایفا میکنند. پس از ساخت برخی از رباتهای پایه مانند ربات دنبالکننده خط ، ربات کنترلشده توسط کامپیوتر و غیره، ما این ربات کنترلکننده حرکتی مبتنی بر شتابسنج را با استفاده از آن توسعه دادهایم. آردوینو uno. در این پروژه از حرکت دست برای راندن ربات استفاده کرده ایم. برای این منظور از شتاب سنج که بر روی شتاب کار می کند استفاده کرده ایم.
قطعات مورد نیاز
- آردوینو UNO
- موتورهای DC
- شتاب سنج
- HT12D
- HT12E
- جفت RF
- درایور موتور L293D
- باتری 9 ولت
- کانکتور باتری
- کابل یو اس بی
- ربات شاسی بلند
جفت RF: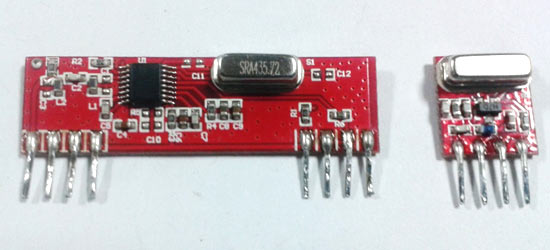
یک ربات ژست کنترل شده با استفاده از دست به جای هر روش دیگری مانند دکمه ها یا جوی استیک کنترل می شود. در اینجا فقط باید دست را برای کنترل ربات حرکت دهید. یک دستگاه فرستنده در دست شما استفاده می شود که حاوی فرستنده RF و شتاب سنج است. این دستور را به ربات منتقل می کند تا بتواند کارهای مورد نیاز مانند حرکت به جلو، عقب، گردش به چپ، چرخش به راست و توقف را انجام دهد. تمام این وظایف با استفاده از حرکت دست انجام خواهد شد.
در اینجا مهمترین جزء شتاب سنج است. شتاب سنج یک دستگاه اندازه گیری شتاب 3 محوره با برد +-3g است. این دستگاه با استفاده از سنسور سطح پلی سیلیکونی و مدار تهویه سیگنال برای اندازه گیری شتاب ساخته شده است. خروجی این دستگاه ماهیت آنالوگ و متناسب با شتاب می باشد. این دستگاه شتاب استاتیک گرانش را هنگامی که آن را کج می کنیم اندازه گیری می کند. و به صورت حرکت یا ارتعاش نتیجه می دهد.
طبق دادههای adxl335 ساختار میکروماشین شده پلی سیلیکونی روی سطح ویفر سیلیکونی قرار گرفته است. فنرهای پلی سیلیکونی ساختار را روی سطح ویفر معلق کرده و در برابر نیروهای شتاب مقاومت می کنند. انحراف سازه با استفاده از یک خازن دیفرانسیل که دارای صفحات ثابت مستقل و صفحات متصل به جرم متحرک است اندازه گیری می شود. صفحات ثابت توسط امواج مربعی 180 درجه خارج از فاز هدایت می شوند. شتاب جرم متحرک را منحرف می کند و خازن دیفرانسیل را نامتعادل می کند و در نتیجه خروجی سنسوری ایجاد می شود که دامنه آن متناسب با شتاب است. سپس از تکنیک های دمودولاسیون حساس به فاز برای تعیین مقدار و جهت شتاب استفاده می شود.
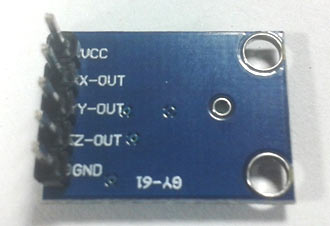
پین توضیحات شتاب سنج
- منبع تغذیه Vcc 5 ولت باید در این پین وصل شود.
- X-OUT این پین یک خروجی آنالوگ در جهت x می دهد
- Y-OUT این پین یک خروجی آنالوگ در جهت y می دهد
- Z-OUT این پین یک خروجی آنالوگ در جهت z می دهد
- زمین GND
- ST این پین برای تنظیم حساسیت سنسور استفاده می شود
نمودار مدار و توضیح
ربات کنترل با ژست به دو بخش تقسیم می شود:
- بخش فرستنده
- قسمت گیرنده
در قسمت فرستنده از یک شتاب سنج و یک واحد فرستنده RF استفاده شده است. همانطور که قبلاً بحث کردیم که شتاب سنج یک خروجی آنالوگ می دهد، در اینجا باید این داده های آنالوگ را به دیجیتال تبدیل کنیم. برای این منظور از مدار مقایسه کننده 4 کانالی به جای هر ADC استفاده کرده ایم. با تنظیم ولتاژ مرجع یک سیگنال دیجیتال دریافت می کنیم و سپس این سیگنال را به انکودر HT12E اعمال می کنیم تا داده ها را رمزگذاری کرده یا به صورت سریال تبدیل کنیم و سپس این داده ها را با استفاده از فرستنده RF به محیط ارسال کنیم.
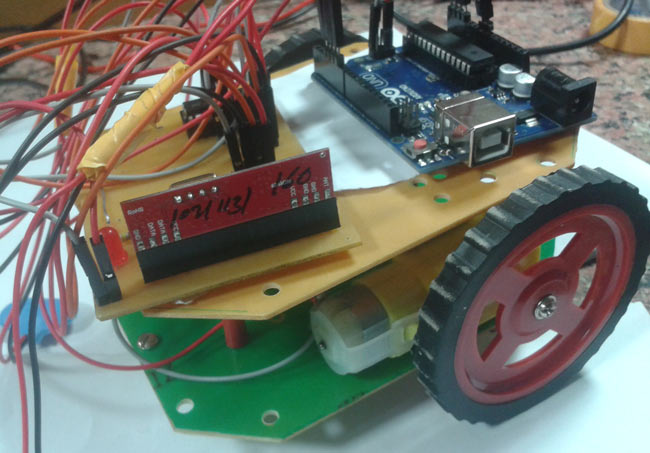
در انتهای گیرنده از گیرنده RF برای دریافت داده استفاده کرده و سپس به رمزگشای HT12D اعمال کرده ایم. این آی سی رمزگشا، داده های سریال دریافتی را به موازی تبدیل می کند و سپس با استفاده از آردوینو خوانده می شود. با توجه به داده های دریافتی، ما با استفاده از دو موتور DC در جهت جلو، عقب، چپ، راست و توقف، ربات را هدایت می کنیم.
کار کردن
هنگامی که فرستنده را در دست خود قرار می دهیم، ربات کنترل شده با اشاره حرکت می کند. وقتی دست را به سمت جلو کج می کنیم، ربات شروع به حرکت به جلو می کند و تا دستور بعدی به حرکت خود ادامه می دهد.
وقتی دست را به سمت عقب متمایل می کنیم، ربات حالت خود را تغییر می دهد و شروع به حرکت در جهت عقب می کند تا زمانی که دستور دیگری داده شود.
