

انواع مختلفی از ربات ها وجود دارد، از انواع ساده مانند ماشین اسباب بازی گرفته تا انواع پیشرفته مانند ربات های صنعتی. ما قبلاً انواع مختلفی از ربات ها را با استفاده از فناوری های مختلف پوشش داده ایم، نگاهی به آنها بیندازید:
- ربات پیرو خط با استفاده از میکروکنترلر 8051
- ربات فالوور خط با استفاده از آردوینو
- ربات کنترل شده DTMF با استفاده از آردوینو
و اکنون یک ربات دیگر را به بخش " پروژه های رباتیک " خود اضافه می کنیم ، این بار با استفاده از Arduino و Blynk App یک ربات کنترل شده Wi-Fi ایجاد می کنیم . این ربات مبتنی بر آردوینو را می توان به صورت بی سیم با استفاده از هر تلفن هوشمند اندرویدی دارای Wi-Fi کنترل کرد.
برای نمایش ربات کنترل شده وای فای ، از یک اپلیکیشن موبایل اندرویدی به نام Blynk استفاده کرده ایم . Blynk یک برنامه بسیار سازگار با آردوینو برای ساخت پروژه مبتنی بر اینترنت اشیا است . این برنامه را می توان از فروشگاه Google Play دانلود کرد و به راحتی می توان آن را پیکربندی کرد.
مراحل پیکربندی برنامه Blynk:
1. ابتدا آن را از گوگل پلی استور دانلود کرده و در گوشی موبایل اندروید نصب کنید.
2. پس از این نیاز به ایجاد حساب کاربری می باشد. می توانید از اکانت جیمیل فعلی خود استفاده کنید.
3. حالا Arduino Board را انتخاب کنید و نامی برای پروژه خود بگذارید.
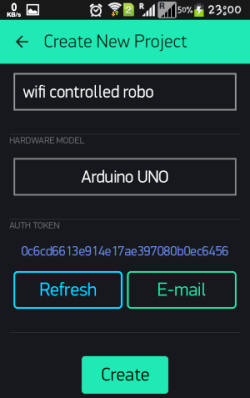
4. کد Auth Token را یادداشت کنید یا به سادگی آن را به حساب ایمیل خود ارسال کنید و سپس در طرح آردوینو (کد برنامه) کپی و جایگذاری کنید.- 5. این کد رمز تأیید را در طرح آردوینو وارد کنید.
-
6. سپس بر روی دکمه ایجاد در برنامه Blynk کلیک کنید.
7. حالا ویجت جوی استیک را انتخاب کنید، روی جوی استیک کلیک کنید، جوی استیک را پیکربندی کنید (ویدیو را در آخر ببینید) و دکمه برگشت را بزنید.
-
8. بعد از آن دکمه Play را در بالای سمت راست صفحه فشار دهید.
تمام این فرآیند، استفاده از برنامه Blynk، در ویدیویی که در پایان ارائه شده است، به وضوح توضیح داده شده است.
قطعات مورد نیاز:
- آردوینو UNO
- ماژول وای فای ESP8266
- کابل یو اس بی
- سیم های اتصال
- L293D
- موتورهای DC
- باتری ها
- 10K POT (اختیاری)
- شاسی ربات به اضافه چرخ
- کاستور غلتکی
- تلفن همراه اندروید
- برنامه Blynk
-
توضیح مدار:
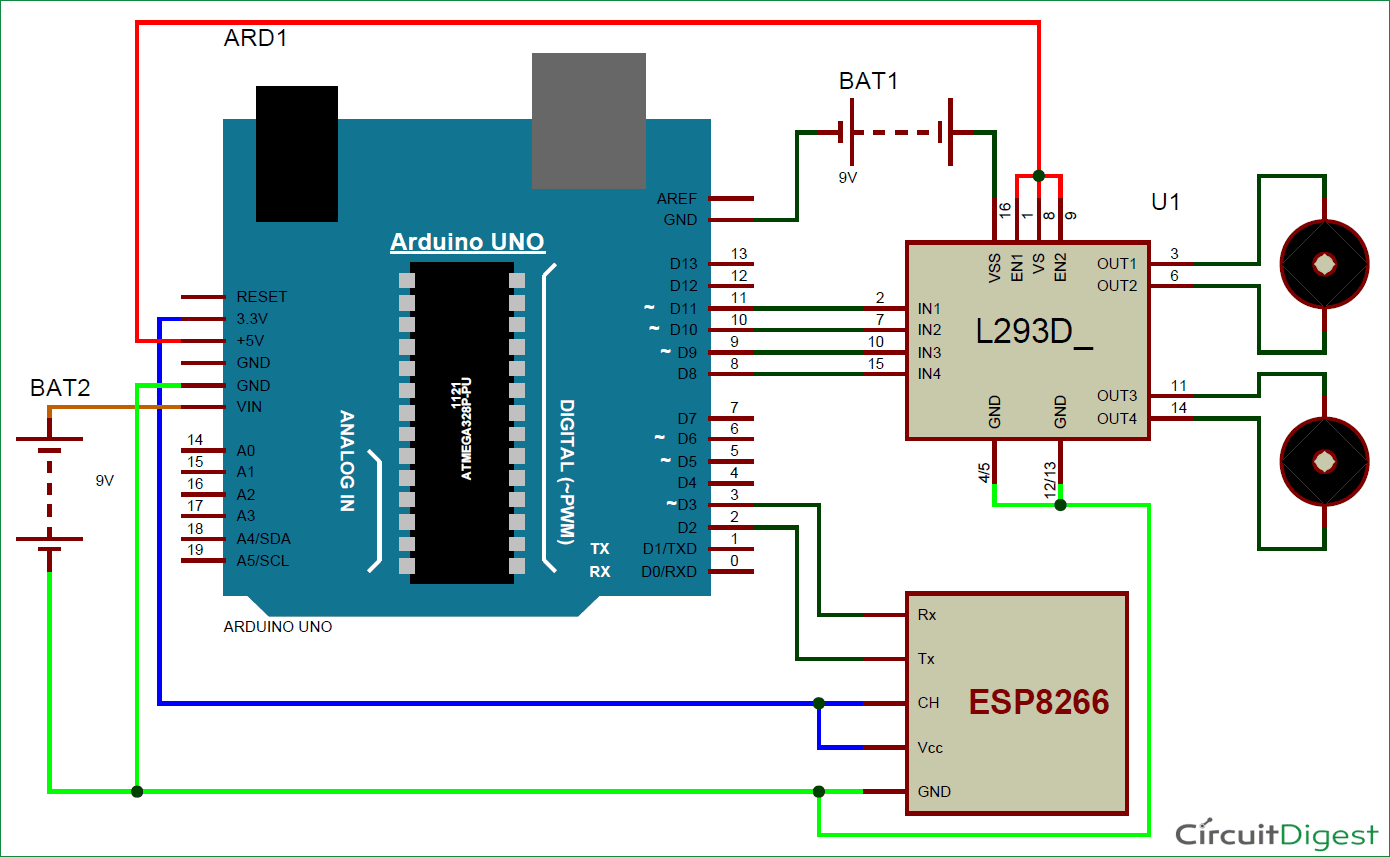
نمودار مدار ربات کنترل شده وای فای در زیر آورده شده است. ما عمدتاً به یک ماژول Wi-Fi آردوینو و ESP8266 نیاز داریم . پایه های Vcc و GND ESP8266 مستقیماً به 3.3 ولت و GND آردوینو و CH_PD نیز با 3.3 ولت وصل می شوند. پایه های Tx و Rx ESP8266 مستقیماً به پایه های 2 و 3 آردوینو متصل می شوند. نرم افزار Serial Library برای برقراری ارتباط سریال در پایه 2 و 3 آردوینو استفاده می شود. ما قبلاً رابط ماژول Wi-Fi ESP8266 با آردوینو را به طور مفصل پوشش داده ایم.
یک آی سی درایور موتور L293D برای راندن موتورهای DC استفاده می شود. پایه های ورودی آی سی درایور موتور مستقیماً به پایه های 8، 9، 10 و 11 آردوینو متصل می شود. و موتورهای DC در پین های خروجی آن متصل می شوند. در اینجا از باتری 9 ولتی برای به حرکت درآوردن موتورهای مدار و DC استفاده کرده ایم.
