


این ربات کنترل شده Wi-Fi را می توان با استفاده از سپر ARMA IoT برای UNO و برنامه Blynk که رابط کاربری را فراهم می کند، از هر نقطه کنترل کرد.

بررسی اجمالی
ربات ساده کنترل شده WiFi با استفاده از ARMA IoT و Blynk!
این پروژه از Arduino Uno متصل به وای فای با استفاده از سپر ARMA IoT استفاده می کند و با استفاده از برنامه Blynk کنترل می شود که هم برای iOS و هم برای اندروید در دسترس است. شاسی یک شاسی ساده است که از ورق فلز فشرده با ضخامت سنج بالا ساخته شده است.
موارد استفاده شده در این پروژه
اجزای سخت افزاری:
| اجزاء | تعداد آیتم ها |
| Arduino UNO و Genuino UNO | 1 |
| درایورهای موتور H-Bridge دوگانه Texas Instruments L293D | 1 |
| Mektrasys ARMA IoT | 1 |
| سیم های جامپر (عمومی) | 1 |
| کابل USB-A به B | 1 |
| شاسی رباتیک ورق فلزی | 1 |
| موتورهای dc دنده ای | 2 |
| چرخ برای موتور dc | 1 |
| چرخ کرچک | 1 |
| مهره و پیچ برای بستن چرخ کرچک | 3 |
| آداپتور cum شارژر باتری 12 ولت | 1 |
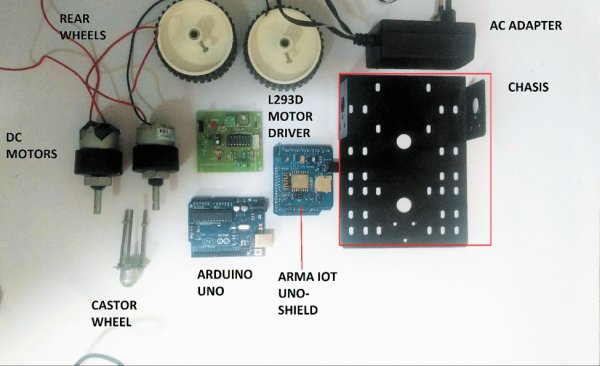
موتورهای مورد استفاده موتورهای DC دنده ای با سرعت نامی 100 RPM هستند و با منبع تغذیه 12 ولتی که از طریق ماژول درایور موتور داده می شود کار می کند. چرخ های عقب از پلاستیک بکر با قطر 680 میلی متر ساخته شده اند. چرخ کاستور با استفاده از مهره و پیچ بر روی شاسی سوار می شود. تمام تخته ها روی شاسی قرار می گیرند و با استفاده از پیچ وصل می شوند.
ویدئوی زیر نحوه توسعه این پروژه و راه اندازی آن را نشان می دهد.
شماتیک ها شامل اتصالات برای درایور موتور L293D و ARMA IoT است.
دستورالعمل مونتاژ ربات
• کد را در آردوینو UNO ارائه شده در مخزن GitHub ما آپلود کنید.
• سپر ARMA IoT را روی Arduino UNO قرار دهید.
• شاسی را مونتاژ کرده و ماژول درایور L293D و آردوینو را روی آن ثابت کنید.
• اتصالات را مطابق شماتیک های داده شده ایجاد کنید.
• سپر ARMA IoT را تقویت کنید.
اکنون ربات آماده کار است
