پس از الهام گرفتن از موتورهای RYNO و دیگر اسکوترهای خود متعادل کننده Segway، همیشه می خواستم چیزی مشابه بسازم. برای مدتی فکر کردم، تصمیم گرفتم با استفاده از آردوینو یک ربات Self Balancing بسازم . به این ترتیب من می توانم مفهوم اساسی پشت همه این اسکوترها را درک کنم و همچنین یاد بگیرم که الگوریتم PID چگونه کار می کند.
انتخاب قطعات برای ربات خود
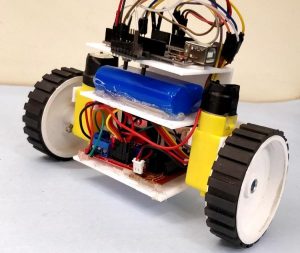
قبل از اینکه همه گزینههای ساخت ربات را به شما بگویم، اجازه دهید مواردی را که در این پروژه استفاده کردهام فهرست کنم
آردوینو UNO
موتورهای DC دنده ای (زرد رنگ) - 2 شماره
ماژول درایور موتور L298N
MPU6050
یک جفت چرخ
باتری لیتیوم یون 7.4 ولت
سیم های اتصال
بدنه پرینت سه بعدی
کنترلکننده: کنترلکنندهای که من در اینجا استفاده کردهام Arduino UNO است، چرا چون استفاده از آن به سادگی آسان است. شما همچنین میتوانید از آردوینو نانو یا آردوینو مینی استفاده کنید، اما من به شما توصیه میکنم از UNO استفاده کنید زیرا میتوانیم آن را مستقیماً بدون هیچ سختافزار خارجی برنامهنویسی کنیم.
موتورها: بهترین انتخاب موتوری که می توانید برای ربات خود بالانس استفاده کنید، بدون شک موتور استپر خواهد بود. اما برای ساده نگه داشتن همه چیز از موتور دنده DC استفاده کرده ام. بله داشتن استپر اجباری نیست. این ربات با این موتورهای دنده DC زرد رنگ رایج ارزان قیمت نیز به خوبی کار می کند.
درایور موتور: اگر موتورهای دنده DC مانند من را انتخاب کرده اید، می توانید مانند من از ماژول درایور L298N استفاده کنید یا حتی یک L293D باید به خوبی کار کند. درباره کنترل موتور DC با استفاده از L293D و Arduino بیشتر بدانید.
چرخ ها: این افراد را دست کم نگیرید. به سختی متوجه شدم که مشکل از چرخ های من است. بنابراین مطمئن شوید که چرخ های شما چسبندگی خوبی بر روی زمینی که استفاده می کنید داشته باشند. به دقت مراقب باشید، دستگیره شما هرگز نباید اجازه دهد چرخ های شما روی زمین بچرخد.
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
After being inspired by RYNO motors and other self balancing scooters from Segway, I always wanted to build something similar. Thinking for while, I decided to build a Self Balancing Robot using Arduino. This way I would be able to grasp the underlying concept behind all these scooters and also learn how PID algorithm works.
Selecting the Parts for your Bot
Before I tell you all the options for building the bot let me list the items that I have used in this project
Arduino UNO
Geared DC motors (Yellow coloured) – 2Nos
L298N Motor Driver Module
MPU6050
A pair of wheels
7.4V Li-ion Battery
Connecting wires
3D Printed Body
Controller: The controller that I have used here is Arduino UNO, why because it is simply easy to use. You can also use a Arduino Nano or Arduino mini but I would recommend you to stick with UNO since we can program it directly without any external hardware.
Motors: The best choice of motor that you can use for a self balancing robot, without a doubt will be Stepper motor. But To keep things simple I have used a DC gear motor. Yes it is not mandatory to have a stepper; the bot works fine with these cheap commonly available yellow coloured DC gear motors as well.
Motor Driver: If you have selected the DC gear motors like mine then you can either use the L298N driver module like me, or even a L293D should work just fine. Learn more about controlling DC motor using L293D and Arduino.
Wheels: Do not under estimate these guys; I had a tough time figuring out that the problem was with my wheels. So make sure your wheels have good grip over the floor you are using. Watch closely, your grip should never allow your wheels to skit on the floor.