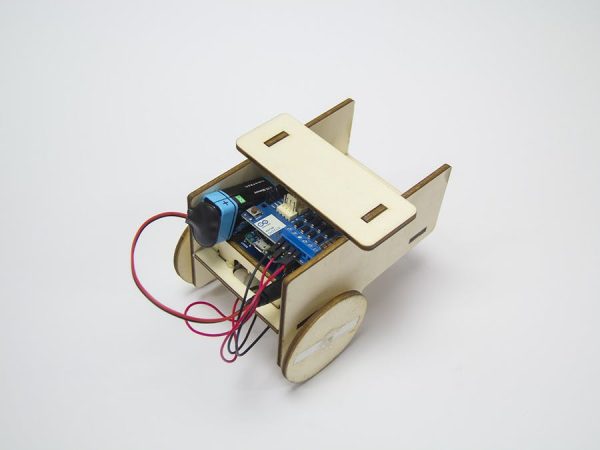
هدف این پروژه نشان دادن نحوه استفاده از آداپتور MKR2UNO با MKR1000 و محافظ موتور آردوینو است. این قابلیتهای وب سرور آردوینو MKR1000 و ویژگی محافظ موتور آردوینو را با هم ترکیب میکند تا دو موتور DC مختلف را در سرعت و جهت به حرکت درآورد و یک ربات مینی کنترلشده با وایفای را ایجاد میکند.
فایل برش لیزری
این ربات بر اساس این فایل برش لیزری ساخته شده است، فقط آن را دانلود و برش دهید! می توانید موتورها را به دلخواه بچسبانید یا پیچ کنید!
حتی اگر پایه چوبی برای نصب بسیار ساده و ساده باشد، مراحل نصب را در اینجا مشاهده می کنید:
دو موتور را روی دیوارهای جانبی پیچ یا چسب بزنید.
دو دیوار جانبی را با استفاده از چسب داغ به پایه مرکزی بچسبانید.
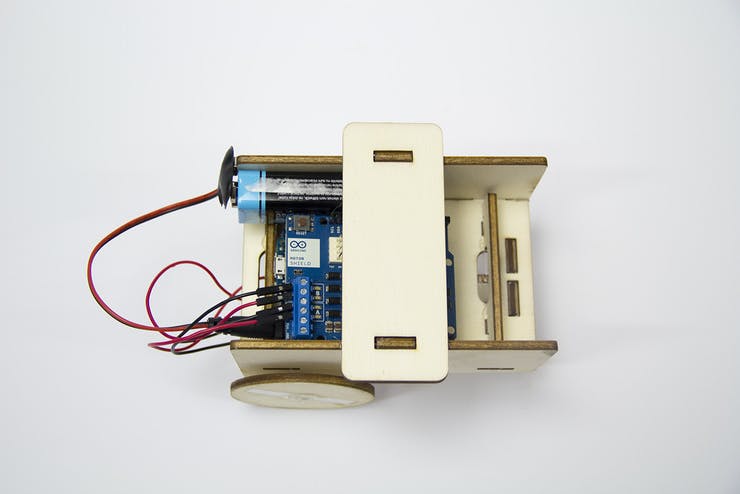
توپ شیشه ای را در سوراخ گرد قرار دهید و آن را با قطعه دوم ثابت کنید.
تکیه گاه توپ شیشه ای را به پایه مرکزی بچسبانید.
دو پایه تخته را به پایه مرکزی بچسبانید. این از حرکت بیش از حد الکترونیک جلوگیری می کند.
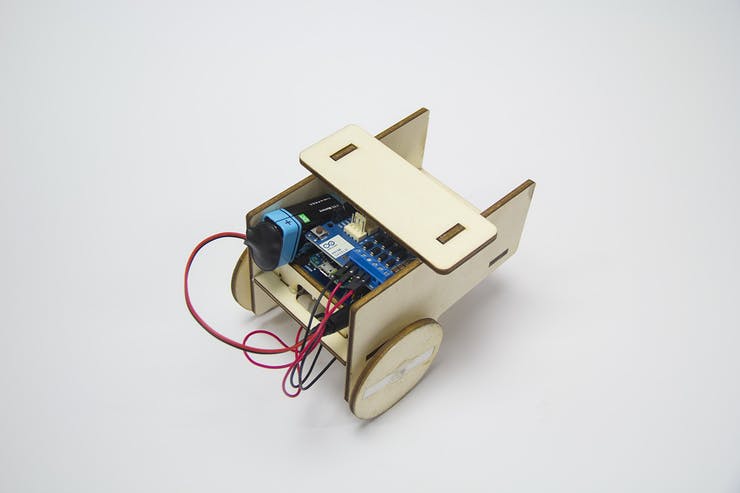
روی آن را چسب بزنید تا ساختاری محکم داشته باشید.
لاستیک ها را در چرخ دنده های موتور قرار دهید. برای جلوگیری از حرکات زیاد می توانید آنها را به چرخ دنده بچسبانید.
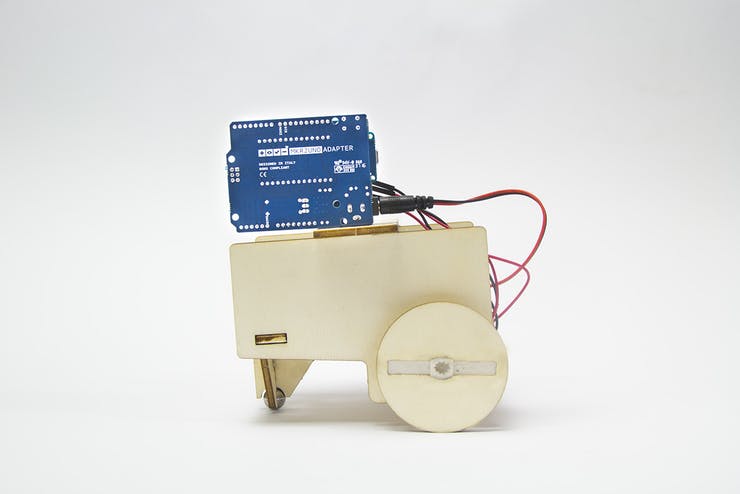
اتصالات
اتصالات بسیار ساده هستند و در تصویر طرح بندی Fritzing نشان داده شده اند. به هر حال اگر موتورها در جهت درست نمی چرخند (با توجه به دکمه فشرده شده در رابط وب) باید سیم های موتوری را که درست عمل نمی کند عوض کنید.
رابط وب
رابط وب بسیار ابتدایی و ساده در MKR1000 میزبانی و کدگذاری شده است و به کاربر این امکان را می دهد که انتخاب کند که ربات باید به بالا، پایین، چپ یا راست برود، همانطور که در تصویر زیر نشان داده شده است.