

طرح:
حرکت چرخشی تولید شده توسط موتور با استفاده از یک میله رزوه ای استاندارد 1/2-13 به عنوان یک پیچ سرب به حرکت خطی تبدیل می شود. برای محاسبه ناهماهنگی های زاویه ای در میله، موتور مستقیماً به آن متصل نمی شود، بلکه از طریق یک سیستم تسمه و قرقره متصل می شود. غلتک درب صفحه بلبرینگ برای افزایش کشش و مبارزه با کشش در تسمه اضافه شده است. به منظور جلوگیری از حرکت بیش از حد بلوک به سمت چپ یا راست، دو سوئیچ پین پین در محدوده های حرکتی مورد نظر قرار می گیرند. هنگامی که بلوک یکی از پیستون ها را فشار می دهد، میکروکنترلر جهت چرخش موتور را تغییر می دهد.
این لیزر دارای یک درپوش لنز قابل جابجایی است که به لیزر اجازه می دهد تا یک خط عمودی به جای یک پرتو باریک ایجاد کند. این یکی از مشکلات عمده ای که در فرآیند طراحی اولیه با آن مواجه می شود را حل می کند. از آنجایی که سیستم فقط میتواند موقعیت افقی را پیدا کند، اگر ترانزیستور نوری فقط یک پرتو باریک تولید کند، باید در همان ارتفاع عمودی لیزر قرار گیرد، در غیر این صورت، لیزر فقط از بالا یا زیر سنسور عبور میکند. این واقعیت که لیزر به جای آن یک خط ایجاد می کند، به این معنی است که موقعیت عمودی فوتوترانزیستور دیگر مهم نیست.
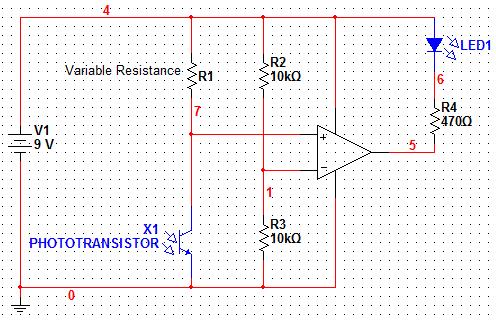
مشکل دیگری که در طول ساخت و ساز با آن مواجه شد، لزوم در نظر گرفتن شرایط مختلف نور محیط بود. نور یک اتاق، یا حتی بخشی از یک اتاق، با اتاق دیگر متفاوت است و اگر خیلی روشن باشد، فوتوترانزیستور به اشتباه فعال می شود. حساسیت فوتوترانزیستور با مقاومت خاصی در مدار، R1 در نمودار زیر تعیین می شود. برای حل مشکل این مقاومت به گونه ای ساخته شد که قابل تنظیم باشد. سه جفت هدر وجود دارد که سه مقاومت را می توان به صورت سری وصل کرد. افزایش مقاومت باعث افزایش حساسیت می شود و بالعکس. اگر تنظیم دقیق مورد نظر باشد، می توان یک پتانسیومتر مناسب به جای یک مقاومت استاندارد اضافه کرد.
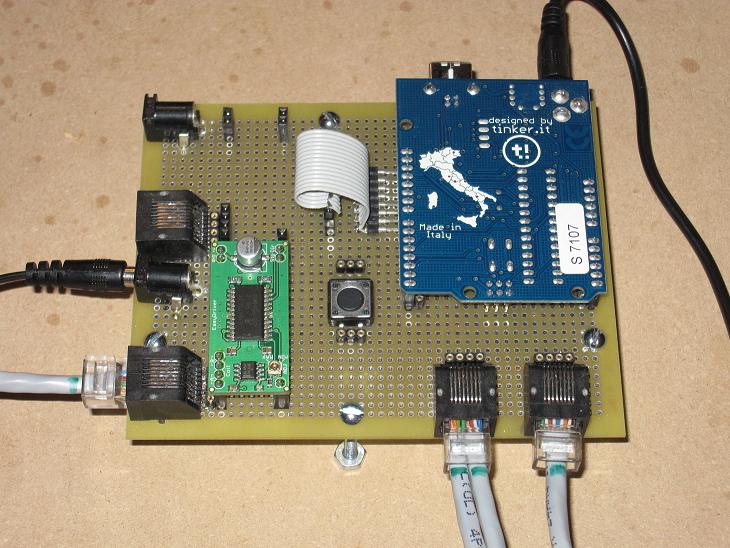
به جای استفاده از برد میکروکنترلر ارائه شده، یک کارت Arduino Duemilanove برای کنترل سیستم انتخاب شد. جزء دیگر روی برد مدار، درایور موتور پله ای EasyDriver v3 است. این بخش به موتور اجازه می دهد تا با استفاده از تنها 2 پین خروجی دیجیتال کنترل شود و همچنین کد را ساده می کند. جک های RJ45 با استفاده از کابل های استاندارد اترنت امکان ارتباط و انتقال نیرو بین موتور، سنسورها و میکروکنترلر را فراهم می کنند.
برای جزئیات بیشتر: روش هدف گیری کنترل شده توسط کامپیوتر
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Design:
The rotational motion produced by the motor is transformed into linear motion through the use of a standard 1/2″-13 threaded rod as a lead screw. To account for angular misalignments in the rod the motor is not attached to it directly, but rather through a belt and pulley system. The ball bearing screen door roller is added to increase the tension and to combat the stretching in the belt. In order to prevent the block from moving too far to the left or right two pin plunger switches are emplaced at the desired limits of motion. When the block depresses one of the plungers the microcontroller switches the rotational direction of the motor.
The laser has a removable lens cap which allows the laser to produce a vertical line, rather than just a narrow beam. This solves one of the major problems encountered in the early design process. Because the system can only find horizontal position the phototransistor would have to be at the same vertical height of the laser if it was only producing a narrow beam, otherwise, the laser would just pass above or below the sensor. The fact that the laser creates a line instead, however, means that the vertical position of the phototransistor is no longer important.
