

یک پروژه مقدماتی عالی برای کسانی که در پلتفرم IoT و Arduino غواصی می کنند. کار با موتورها و حسگر مادون قرمز به تازهکاران کمک میکند تا اجزای مختلف و سنسورهای سازگار با آردوینو را درک کنند. با استفاده از کنترل از راه دور، شما قادر خواهید بود حرکت ربات را کنترل کنید و به ربات اجازه دهید در خطوط مستقیم حرکت کند یا بر اساس ورودی انسان بچرخد.
ایجاد شده توسط دیویانک شاه، یکی از رشته های آینده علوم کامپیوتر در دانشگاه کالیفرنیا، ریورساید. دیویانک شاه فردی جاه طلب است که به دنبال تحصیل بیشتر در علوم کامپیوتر با علاقه عمیق به فناوری های میکروکنترلر و ریزپردازش است.
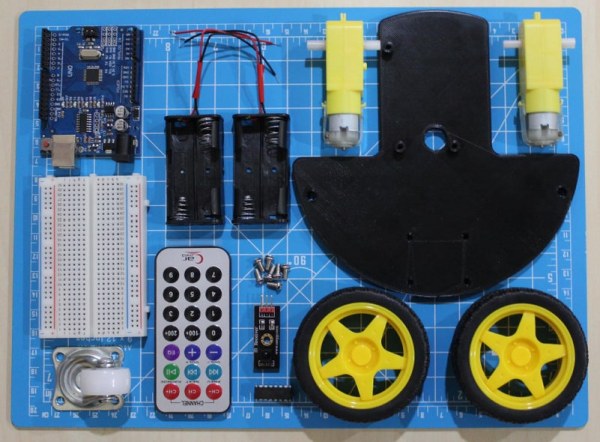
تدارکات
- آردوینو اونو
- تخته نان بدون لحیم 400 نقطه
- چرخ چرخ (چرخ جهانی)
- 2 عدد موتور TT (گیربکس 1:48)
- 2 عدد چرخ موتور TT با درج های شکاف دار
- نگهدارنده باتری سلولی 2 x 2 AA
- 4 عدد باتری AA 1.5 ولتی
- درایور موتور L293D
- سنسور IR با ریموت
- مجموعه ای از کابل های جامپر
- نوار 3M دو طرفه
- لحیم کاری با لحیم کاری
- هیت شرینک / نوار الکتریکی
- پیچ درایور
- چاپگر سه بعدی (Ender 3 V2 استفاده شده)
مرحله 1: CAD: طراحی پایه
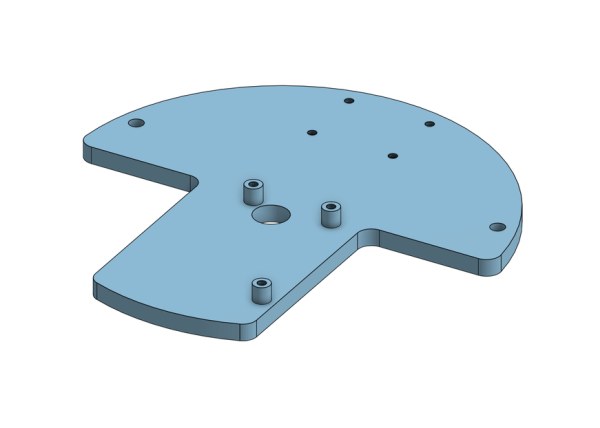
هنگام طراحی پایه باید به چند نکته توجه کرد. یکی از چالشهای اصلی فاصلهگذاری و اطمینان از اینکه همه چیز از جمله سیمها در آن قرار میگیرد، است. طرح های رایج شامل شروع با دایره یا مربع و ایجاد پایه ای که نیازهای شما را برآورده می کند.
با شروع با یک دایره اکسترود شده 6 میلی متری، ابتدا برای چرخ ها جای گرفتم. با قطر 66 میلیمتر و عرض تایر 26 میلیمتر، توانستم بخش قابلتوجهی از دایره را حذف کنم تا مطمئن شوم چرخها فضای کافی برای حرکت دارند و به سایر لوازم الکترونیکی یا قطعات پایه گیر نمیدهند.
در طرف دیگر دایره (قسمت زیر) سوراخ هایی برای نصب چرخ کاستور ایجاد شد. چرخ چرخ مورد استفاده دارای ابعاد 33mm x 27mm بود. این سوراخها از این نظر منحصربهفرد هستند که سوراخهای رزوهداری هستند که پیچها کاملاً در آن قرار میگیرند. با استفاده از این راهنمای عالی توسط جان تیترتون ، با توجه به اینکه من از پیچهای استاندارد M3 استفاده میکردم، توانستم سوراخهایی به عرض 3 میلیمتر ایجاد کنم و این مفهوم را بپذیرم و مارپیچ را با گام 0.5 میلیمتری که در جهت عقربههای ساعت حرکت میکرد، ایجاد کنم. طبق مثلث متساوی الاضلاع، طول ضلع 0.45 میلی متر بود و من در مسیر مارپیچ جاروب انجام دادم. با تکرار این فرآیند 4 بار، من توانستم پایه چرخ چرخ خود را ایجاد کنم.
همین مفهوم برای سوراخهای نصب آردوینو نیز اعمال شد. با این حال، این بار، سیلندرهایی شبیه به حالت ایستاده ساخته شدند تا به آردوینو اجازه دهند تا به راحتی بنشیند، زیرا اتصالات لحیم شده در پایین آردوینو از نصب فلاش جلوگیری می کند. یک تصویر مرجع عالی حفره های مختلف روی آردوینو و ابعاد آنها را به تصویر می کشد.
در نهایت، 3 سوراخ ایجاد شد و در سرتاسر پایه پخش شد تا مدیریت کابل را راحت کند. با توجه به موقعیت باتری در پایین، دو سوراخ در هر دو طرف به پایانه های باتری اجازه می دهد تا به برد برد و آردوینو متصل شوند. ابعاد این سوراخ ها 5 میلی متر بود تا سیم به راحتی از آن عبور کند. سوراخ نزدیک به مرکز این امکان را می دهد که سیم هایی که از موتورها می آیند به درایور موتور L293D متصل شوند. ابعاد سوراخ 12 میلی متر بود تا حداقل 4 سیم به راحتی از بین بروند. من در نهایت از یک فیله 5 میلی متری روی گوشه های تیز استفاده کردم تا لبه های ناهموار را صاف کنم.
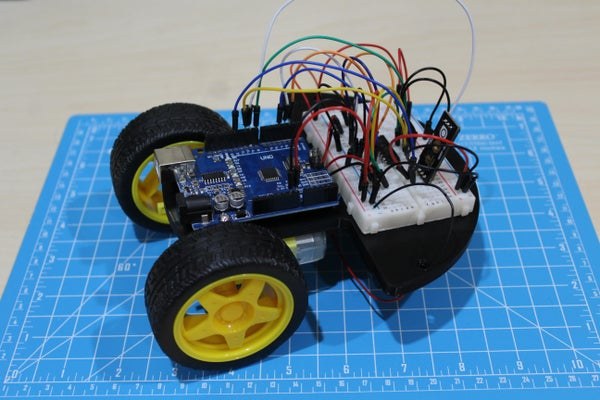
مرحله 2: مونتاژ: قرار دادن همه چیز با هم
با استفاده از 4 عدد پیچ M3-6 می توانیم ابتدا چرخ چرخ را وصل کنیم. هنگام وصل کردن چرخ، باید اطمینان حاصل کنیم که چرخ در جهت مخالف بن بست های موقتی است که برای آردوینو ایجاد کردیم.
اگر موتورهای TT سیمهایی را که قبلاً روی سرنخها لحیم شده ندارند، قبل از اتصال به پایه، سیمها را لحیم کنید. ما موتورها را روی "ساقه" شکل قارچ قرار خواهیم داد. ترجیحاً برای جلوگیری از تداخل با چرخها، سرنخهای موتور باید به سمت داخل باشند، ما پایانههای قرمز را نزدیکتر به پایه قرار دادهایم زیرا این کار باعث میشود که کدگذاری ما بعداً سازگارتر باشد. میتوانید پیکربندی را تغییر دهید، با این حال، توجه داشته باشید که تغییرات در کد باید مطابق با آن منعکس شود. با استفاده از نوار 3 میلی متری می توانیم موتور را به موقعیت خود وصل کنیم. اطمینان حاصل کنید که هر دو موتور را قبل از قرار دادن موتورها از نداشتن فضای کافی و تداخل با یکدیگر جلوگیری کنید. اکنون میتوانیم چرخها را در انتهای موتورهای TT وصل کنیم و سیمها را از سوراخ 12 میلیمتری نزدیک مرکز عبور دهیم.
با حرکت روی نگهدارندههای خمیر، ابتدا باید آنها را به صورت سری وصل کنیم، قبل از اینکه آنها را به پایه ثابت کنیم. یکی از پایانه های مثبت (معمولاً قرمز) را به قطب منفی نگهدارنده باتری دیگر (معمولاً مشکی) وصل کنید. سیم ها را به هم لحیم کنید و از هیت شرینک یا نوار الکتریکی برای پنهان کردن محل اتصال لحیم کاری استفاده کنید. محصول نهایی باید منجر به یک ترمینال مثبت (معمولا قرمز) و یک پایانه منفی (معمولاً سیاه) شود که در دو طرف نگهدارندههای باتری قرار دارند. ما میتوانیم این سیمها را از سوراخهای 5 میلیمتری ایجاد شده عبور دهیم و نگهدارندههای باتری را با استفاده از نوار 3 میلیمتری ثابت کنیم (توصیه میشود که از قبل نوار را وصل کنید زیرا ممکن است لحیم کاری را بسیار آسانتر کند).

{kind=link}