

یکی از دوستان یکی از زمینهای بازی مداری Adafruit (نسخه توسعهدهنده) را به من داد تا از آن استفاده کنم، و میخواستم ببینم آیا این یک ربات کنترلکننده خوب است. زمین بازی مدار مملو از ویژگی هایی مانند حسگرها، نئوپیکسل ها و حتی شتاب سنج است.

من میخواستم یک کنترلکننده موتور L9110 اضافه کنم و یک ربات کوچک ایجاد کنم که بتوانم از آن برای نشان دادن برخی از امکانات توسعه استفاده کنم. زمین بازی مدار از IDE استاندارد Arduino استفاده می کند، بنابراین تعداد زیادی کتابخانه و نمونه در وب برای استفاده دارد.
من همچنین میخواستم چیزی قوی بسازم که سیمهای زیادی در معرض آن نباشد تا مبتدیان یا کودکان بتوانند از ربات من استفاده کنند و برنامهنویسی را یاد بگیرند.
افزودن بلوتوث نیز هدفی بود که در ادامه این مقاله در مورد آن صحبت خواهم کرد.
مرحله 1: تجهیزات مورد نیاز
- یک مورد برای ربات شما، من از زنگ هشدار دود قدیمی استفاده کردم
- 2 عدد موتور دنده میکرومتال (من از نسبت 1:298 استفاده کردم اما اگر چیزی سریعتر می خواهید من 1:50-1:100 را پیشنهاد می کنم
- 1 عدد برد کنترل موتور L9110
- 1 عدد زمین بازی مدار آدافرویت
- یک تخته کوچک برای نصب موتورهای خود، مگر اینکه بخواهید آنها را به کیس اضافه کنید.
- سیم های جامپر مختلف
- مجموعه ای از پیچ و مهره که از سوراخ های زمین بازی مدار عبور می کند
- انتهای چشمک های سیم بلوز که باید نصب شوند
- لحیم کاری و لحیم کاری
- چسب حرارتی تفنگی
- مته کوچک / Dremel برای ایجاد سوراخ برای پیچ و مهره در مورد
مرحله 2: کنار هم قرار دادن آن

ابتدا داخل دستگاه هشدار دود قدیمی خود را که قرار بود به عنوان بدنه/قاب ربات استفاده کنم، بیرون آوردم. من می دانم که واضح است، اما لطفاً از هشدار دود کار خود برای این کار استفاده نکنید، یک دستگاه قدیمی بگیرید یا از چیز دیگری به عنوان کیس استفاده نکنید.
من زمین بازی مدار را روی جعبه هشدار دود قرار دادم و مشخص کردم که در آن سوراخ هایی برای عبور پیچ و مهره هایم ایجاد شود، از این سوراخ ها برای اتصال برد راننده موتور و هر چیز دیگری که در آینده می خواهیم استفاده می شود، و تمام سیم ها را در داخل آن نگه می داریم. مورد.
یک اصلاح خوب برای این میتواند استفاده از wingnuts در بالا باشد تا بتوان تخته زمین بازی را جدا کرد و همه چیز دست نخورده باقی ماند.
مرحله 3: ساختن لیدهای پرش با چشمک

من میخواستم برد درایور موتور L9110 را با استفاده از سیمهای جامپر ماده در یک سر و یک چشمک در انتهای دیگر به زمین بازی مدار متصل کنم تا روی پیچها با مهرهها به عنوان رابط استفاده شود.
من از چشمک هایی استفاده کردم که در بسته های 10 تایی قرار داشتند و یک سر سیم های جامپر ماده به ماده را بریدم. سپس همانطور که در تصاویر نشان داده شده است، چشمک ها را روی سیم ها فشار دادم. من لحیم کاری را به انتهای چین خورده اضافه کردم تا در حین مونتاژ یا جابجایی آنها به بیرون کشیده نشوند.
پس از اتمام، انتهای مادگی را به برد درایور موتور L9110 وصل کردم.
حالا من آماده بودم سیم کشی داخل کیس را وصل کنم.
مرحله 4: آماده سازی موتور و رولربال
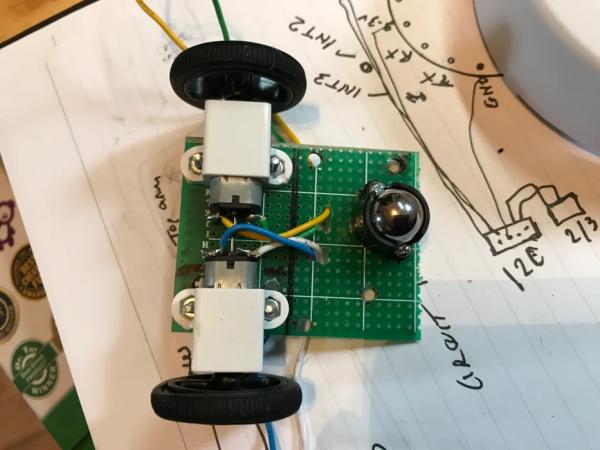
تصمیم گرفتم از یک قطعه مدار قدیمی برای نصب موتورها و نگهدارنده ها به همراه توپ غلتکی استفاده کنم. این نیاز به حفاری در تعدادی مکان همانطور که نشان داده شده است. سپس درایور موتور L9110 را با اتصال سیمکشی به موتورها و کانکتور پیچ داخل کیس تست کردم. خوشحالم که این کار را انجام دادم چون معلوم شد برد درایور موتور کار نمی کند، این را با یک مولتی متر تست کردم.
پس از تعویض و آزمایش با یک طرح ساده آردوینو، جایی را که میخواستم چرخها از پایین کیس عبور کنند، مشخص کردم. سپس با استفاده از درمل، این منافذ را برش دادم تا به موتورها، چرخها و مجموعه رولربالهایم اجازه بدهم در پایین جعبه هشدار دود قرار گیرند.
