

محدوده فراصوت یک کار پیچیده است که توسط ماژول در دسترس برای آردوینو آسان شده است. برای تشخیص یا اندازه گیری فاصله، سیگنال را به هدف ارسال می کند و هدف آن را به عقب منعکس می کند. زمان اندازه گیری آردوینو برای سفر کامل گرفته می شود. همانطور که سرعت صوت مشخص است، فاصله بین ماژول و هدف را می توان به راحتی محاسبه کرد.
معمولاً از این سنسور فقط برای اندازهگیری فاصله از هدف استفاده میشود.

من از HC-SR04 برای این منظور استفاده کرده ام. دو عدد از این سنسور برای این منظور مورد نیاز است.
من سعی کردم چیزی مشابه را در ویدیو زیر توضیح دهم.

مرحله 1: کالیبره کردن سنسور
برای بررسی صحت این سنسور هدفی را در مقابل آن قرار دادم و با استفاده از سنسور اولتراسوند و همچنین با مقیاس خط کش فاصله را اندازه گرفتم. اندازه گیری توسط سنسور اولتراسوند قدرت رو به جلو است. در صورت نیاز برای جزئیات بیشتر، این مقاله را دنبال کنید.
از نمودار بالا، بسیار واضح است که خروجی سنسور نسبتاً خطی است. شیب نیز تقریبا یک است (همانطور که انتظار می رود) و انحراف استاندارد خطا حدود 9 میلی متر است. که بیشتر یک خطای استاتیکی است. همانطور که من تمام فواصل را از انتهای انتهایی سنسور اندازه می گرفتم، در حالی که آردوینو آن را از عنصر ارسال کننده و حسگر اندازه گیری می کند.
مرحله 2: اندازه گیری مختصات دو بعدی: مفهوم
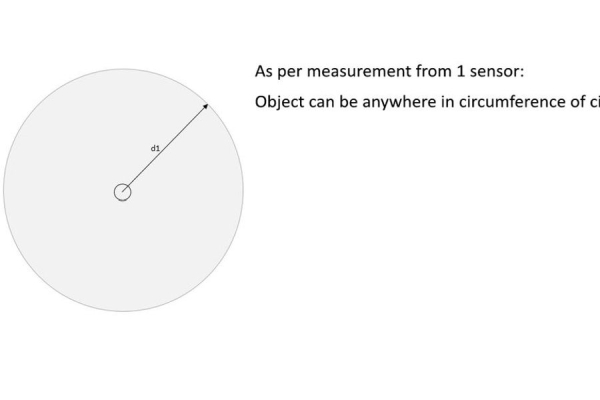
در مورد قبلی، ما فقط یک فاصله از هدف را اندازهگیری میکردیم که دایرهای به آن شعاع اندازهگیری شده را میدهد. جسم می تواند در هر نقطه از محیط دایره باشد. اما سنسور فقط در ناحیه مخروطی شکل عمل می کند، بنابراین این امکان به یک قوس (از دایره) کاهش می یابد.
اگر یک سنسور دیگر را کنار حسگر اول اضافه کنیم، تقاطع هر دوی این حسگرها مکان دقیق هدف را نشان می دهد.
همانطور که در شکل 4 نشان داده شده است، هر دو سنسور دارای یک مخروط عملیاتی هستند، منطقه ای که هر دو مخروط قطع می شوند، مکان دقیق را می توان محاسبه کرد.
اگر جسم در ناحیه ای باشد که فقط با یک مخروط پوشیده شده باشد، فقط محدوده را می توان محاسبه کرد. و بدیهی است که اگر جسمی خارج از این مخروط ها باشد، هیچ ایده ای نخواهیم داشت.
مرحله 3: اندازه گیری مختصات دو بعدی: محاسبه
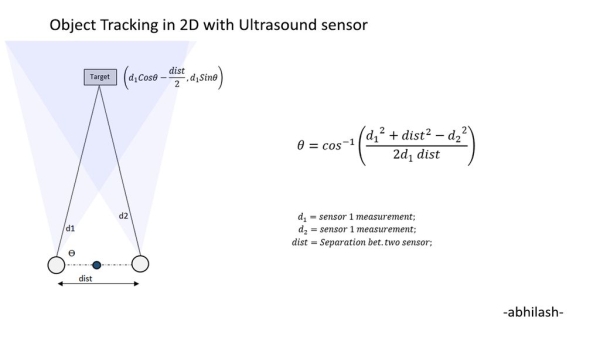
با اندازه گیری فاصله توسط دو سنسور یک مثلث ایجاد می شود. که در آن یک زاویه هدف و در جای خود قرار دارد دو زاویه سنسور هستند. طول تمام اضلاع این مثلث مشخص است.
