

هی همه. امیدوارم حالت خوب شود.
همانطور که می دانید دفعه قبل دوره Arduino UNO را شروع کرده بودیم و نحوه شبیه سازی چشمک زدن LED از طریق Arduino UNO و پیاده سازی آن در proteus ISIS را به شما معرفی کردیم.
حال امروز قصد داریم Servo Motor Simulation را از طریق Arduino UNO در proteus ISIS پیاده سازی کنیم.
سروو موتور چیست؟
با کمک موتورهای سروو می توانید شفت موتور را با استفاده از سیگنال کنترل در یک زاویه خاص قرار دهید. تا زمانی که سیگنال کنترل تغییر نکرده باشد، موتور محور خود را در این موقعیت نگه می دارد. این برای کنترل بازوهای ربات، سطح کنترل هواپیماهای بدون سرنشین یا هر جسمی که می خواهید در زاویه خاصی حرکت کند و در موقعیت جدید خود بماند بسیار مفید است.
سروو موتورها ممکن است بر اساس اندازه یا گشتاور به سرووهای مینی، استاندارد و غول پیکر طبقه بندی شوند. معمولا سروو موتورهای سایز مینی و استاندارد می توانند به طور مستقیم توسط آردوینو بدون نیاز به منبع تغذیه یا درایور خارجی تغذیه شوند. معمولا سروو موتورها دارای بازوهایی هستند که به جسم مورد نیاز برای حرکت متصل هستند.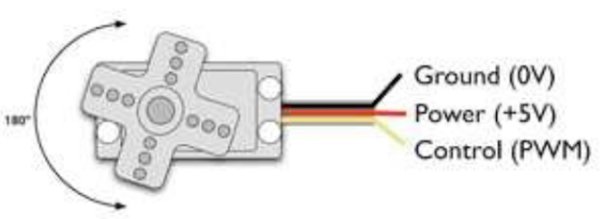
سروو موتور کار می کند:
سروو موتورها دارای سه سیم برق، زمین و سیگنال هستند. سیم برق معمولا قرمز است و باید به پین 5 ولت روی برد آردوینو وصل شود. سیم زمین به طور معمول سیاه یا قهوه ای است و باید به یک پایه زمین در برد آردوینو متصل شود. پین سیگنال معمولاً زرد، نارنجی یا سفید است و باید به پایه 9 برد آردوینو متصل شود.
کنترل مستقیم سروو موتور با آردوینو بسیار آسان است. با این حال، یک سروو موتور ممکن است به طور قابل توجهی بیشتر از آردوینو به جریان نیاز داشته باشد. در پیادهسازی سختافزار، مثال زیر از یک سروو با اندازه استاندارد (بدون بار) استفاده میکند که مستقیماً از آردوینو از طریق USB تغذیه میشود. هنگام تغذیه مستقیم سروو از برد آردوینو:
- سیم مشکی را از سروو به پین GND آردوینو وصل کنید
- سیم قرمز را از سروو به پین +5 ولت آردوینو وصل کنید
- سیم زرد یا سفید را از سروو به پین دیجیتال آردوینو وصل کنید
در پروتئوس نیازی به اتصال پایه های سروموتور 1 و 3 در پروتئوس ندارید.
نمودار شماتیک:
کنترل سروو موتور با استفاده از شبیه سازی آردوینو در پروتئوس
در اینجا می توانید اجرای واقعی سروو موتور در پروتئوس را مشاهده کنید. در پروتئوس نیازی به اتصال +5v و پایه های زمین به سروو موتور ندارید. آنها قبلاً در proteus ISIS ساخته شده اند و به +VCC و پین های زمین متصل هستند.
ما فقط پایه 9 آردوینو UNO را به پایه 2 سروو موتور متصل می کنیم که از طریق آن سیگنال کنترلی که سیگنال مدولاسیون عرض پالس (PWM) است به سروو موتور داده می شود. سیگنال کنترل را می توان به راحتی از طریق برد آردوینو تولید کرد. سروو موتور سیگنال کنترلر شما را می پذیرد که به آن می گوید به چه زاویه ای بچرخد.
سیگنال کنترل فقط یک پالس با طول های مختلف است. طول پالس مربوط به زاویه ای است که موتور به آن می چرخد. همانطور که از کد می بینید که سروو موتور 180 0 دور در جهت عقربه های ساعت و همچنین در خلاف جهت عقربه های ساعت انجام می دهد.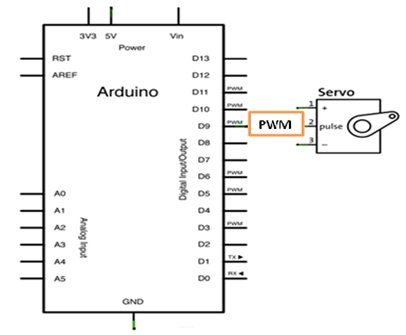
مدار:
در اینجا می توانید نمودار مدار سخت افزاری را مشاهده کنید که برای اجرای عملیات مورد نظر طراحی شده است. همچنین، میتوانید سیم سروو را به سه پایه مجاور وصل کنید و پین متصل به سرب قرمز را روی «HIGH» و پین متصل به سرب سیاه را روی «LOW» قرار دهید. اگر می خواهید آن را به منبع تغذیه جداگانه وصل کنید، سیم های قرمز (5 ولت) و مشکی (GND) باتری / منبع تغذیه را به سیم های قرمز و مشکی سروو وصل کنید و سیم سیگنال را به آردوینو وصل کنید.
