

MPU6050 یک شتاب سنج 3 محوره IC و یک ژیروسکوپ 3 محوره است که در یک واحد ترکیب شده اند . همچنین دارای یک سنسور دما و یک DCM برای انجام یک کار پیچیده است. MPU6050 معمولاً در ساخت هواپیماهای بدون سرنشین و سایر ربات های راه دور مانند یک ربات خود متعادل کننده استفاده می شود. در این پروژه یاد می گیریم که چگونه از MPU6050 یک شیب سنج یا تراز کننده روح استفاده کنیم . همانطور که می دانیم از شیب سنج برای بررسی اینکه آیا سطح کاملاً همسطح است یا خیر استفاده می شود، آنها به صورت حباب سنج یا به عنوان متر دیجیتال در دسترس هستند. در این پروژه قصد داریم یک شیب سنج دیجیتال بسازیم که با استفاده از اپلیکیشن اندروید قابل نظارت است. دلیل استفاده از نمایشگر از راه دور مانند تلفن همراه این است که میتوانیم مقادیر MPU6050 را بدون نیاز به نگاه کردن به سختافزار نظارت کنیم، زمانی که MPU6050 روی یک پهپاد یا مکانهای غیرقابل دسترس دیگری قرار میگیرد، بسیار مفید است.
مواد مورد نیاز:
- آردوینو پرو مینی (5 ولت)
- سنسور ژیروسکوپ MPU6050
- ماژول بلوتوث HC-05 یا HC-06
- برد FTDI
- تخته نان
- سیم های اتصال
- گوشی های هوشمند
مدار:
نمودار مدار کامل این پروژه سنسور شیب آردوینو در زیر نشان داده شده است. فقط سه جزء دارد و به راحتی می توان آن را روی تخته نان قرار داد.
MPU6050 با کمک I2C ارتباط برقرار می کند و از این رو پایه SDA به پایه A4 آردوینو که پایه SDA است و پایه SCL به پایه A5 آردوینو متصل می شود. ماژول بلوتوث HC-06 با کمک ارتباط سریال کار می کند، بنابراین پایه Rx بلوتوث به پایه D11 و پایه Tx بلوتوث به پایه D10 آردوینو متصل می شود. این پایههای D10 و D11 با برنامهنویسی آردوینو بهعنوان پین سریال پیکربندی میشوند. ماژول HC-05 و ماژول MSP6050 با ولتاژ +5 ولت کار می کنند و از این رو همانطور که در بالا نشان داده شده است توسط پین Vcc آردوینو تغذیه می شوند.
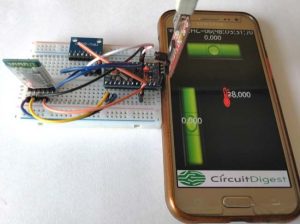
من از چند سیم اتصال تخته نان استفاده کردم و روی یک تخته نان کوچک تنظیم کردم. هنگامی که اتصالات انجام شد، برد من به شکل زیر است.
روشن کردن راهاندازی:
می توانید مدار خود را مانند من از طریق برد برنامه نویسی FTDI تغذیه کنید یا از یک باتری 9 ولت یا آداپتور 12 ولت استفاده کنید و آن را به پین Raw آردوینو پرو مینی وصل کنید. Arduino Pro-mini دارای یک تنظیم کننده ولتاژ داخلی است که این ولتاژ خارجی تنظیم شده +5V را تبدیل می کند.
برنامه نویسی آردوینو:
پس از آماده شدن سخت افزار، می توانیم برنامه نویسی آردوینو را شروع کنیم. مثل همیشه کد کامل این پروژه را می توانید در پایین این صفحه پیدا کنید. اما برای درک بهتر پروژه، کد را به قسمت های کوچک شکستم و آنها را به صورت مراحل زیر توضیح دادم.

اولین گام، اتصال MPU6050 با آردوینو است . برای این پروژه ما از کتابخانه توسعه یافته توسط Korneliusz استفاده می کنیم که از لینک زیر قابل دانلود است
MPU6050 Liberty – Korneliusz Jarzebski
فایل ZIP را دانلود کرده و به آردوینو IDE خود اضافه کنید. سپس به File->Examples->Arduino_MPU6050_Master -> MPU6050_gyro_pitch_roll_yaw بروید . با این کار برنامه مثالی باز می شود که از کتابخانه ای که به تازگی دانلود کرده ایم استفاده می کند. بنابراین بر روی آپلود کلیک کنید و منتظر بمانید تا برنامه در آردوینو پرو مینی شما آپلود شود. پس از انجام این کار، مانیتور سریال خود را باز کنید و نرخ باود خود را روی 115200 تنظیم کنید و بررسی کنید که آیا موارد زیر را دریافت می کنید.
بیشتر بخوانید: شیب سنج آردوینو DIY با استفاده از MPU6050
