

این دستور العمل توضیح می دهد که چگونه یک ریل تایم لپس را با استفاده از یک موتور پله ای که توسط آردوینو هدایت می شود، موتور کنید. ما عمدتاً بر روی Motion Controller تمرکز میکنیم که موتور استپ را به حرکت در میآورد، با این فرض که شما از قبل ریلی دارید که میخواهید آن را موتور کنید.

به عنوان مثال هنگام برچیدن یک ماشین، دو ریل پیدا کردم که میتوانم آنها را به ریل تایم لپس تبدیل کنم. یک ریل از یک تسمه برای به حرکت درآوردن لغزنده و دیگری از یک پیچ استفاده می کند. تصاویر موجود در این دستورالعمل یک ریل پیچی را نشان می دهد، اما همان اصول در مورد ریلی که توسط یک تسمه هدایت می شود اعمال می شود. فقط چند پارامتر وجود دارد که در طول راه اندازی نیاز به تغییر دارند.
مرحله 1: اصل عملیات:

برای عکاسی تایم لپس من از فاصله سنج به نام LRTimelapse Pro-Timer استفاده می کنم که توسط Gunther Wegner طراحی شده است. این یک فاصله سنج منبع باز با کیفیت بالا برای عکاسان تایم لپس، ماکرو و نجومی است که می توانید خودتان آن را بسازید. گانتر، از شما برای این ابزار فوق العاده ای که در دسترس جامعه تایم لپس قرار داده اید سپاسگزاریم. (برای اطلاعات بیشتر به lrtimelapse-pro-timer-free مراجعه کنید )
من فقط یک کد برای کنترل استپر موتور اضافه کردم.
اصل عملیات: راه آهن تایم لپس در حالت Slave کار می کند . این روش کاملا قابل اعتماد است. این بدان معناست که من از LRTimelapse Pro-Timer Intervalometer برای تنظیم تعداد عکس ها و فاصله بین عکس ها استفاده می کنم. فاصله سنج سیگنالی را به دوربین می فرستد تا شاتر را روشن کند. پس از گرفتن عکس، دوربین سیگنالی را به کنترلکننده حرکت ارسال میکند تا نوار لغزنده ریل را روی یک دنباله حرکت/عکس/حرکت حرکت دهد. سیگنال شروع سکانس از کفش داغ فلاش دوربین می آید. فلاش دوربین روی Rear-curtain Synchro تنظیم شده است، بنابراین هنگامی که پرده دوربین بسته می شود، سیگنال به کنترل کننده حرکت ارسال می شود. این بدان معناست که لغزنده تنها زمانی حرکت میکند که شاتر بسته باشد، بنابراین بدون توجه به طول نوردهی کار میکند.
جنس: دو کابل از کنترلکننده حرکت به دوربین (مخصوص مدل دوربین) لازم است 1) یک کابل شاتر دوربین با جک 2.5 میلیمتری و 2) یک آداپتور Hot Shoe با سیم کابل همگامسازی فلش مرد با کابل 3.5 جک میلی متری
مرحله 2: هیئت کنترل حرکت
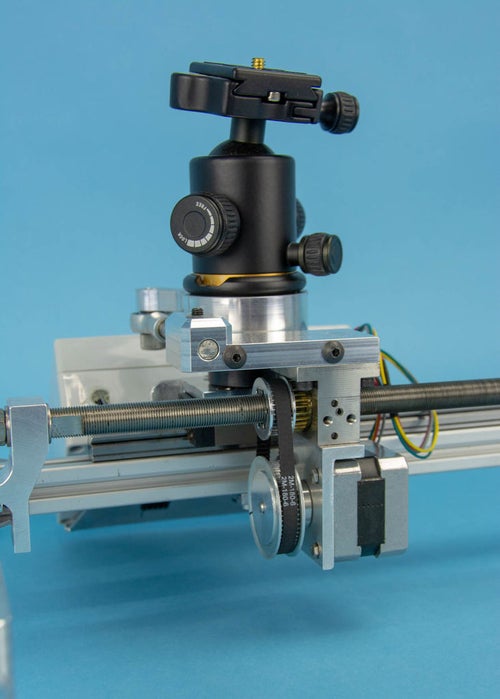
سخت افزار : حرکت لغزنده به وسیله یک پیچ متصل به موتور پله ای NEMA 17 می باشد . موتور پله ای توسط EasyDriver کنترل می شود که توسط Arduino UNO کنترل می شود . برای استفاده از کنترلر با یک پاوربانک متفاوت (از 9 ولت تا 30 ولت) یک ماژول منبع تغذیه سازگار با LM2596 DC-DC Arduino برای تنظیم ولتاژ اضافه کردم. "Arduino Wiring.PDF" پیوست را ببینید .
کابل باز کردن شاتر دوربین با استفاده از جک 2.5 میلی متری به کنترلر وصل می شود. جک مطابق شماتیکی که در پیوست شده است " Shutter release.PDF " سیم کشی شده است. کابل آداپتور Hot Shoe با استفاده از جک 3.5 میلی متری به کنترلر وصل می شود. داشتن دو اندازه متفاوت از وصل شدن کابل به پورت اشتباه جلوگیری می کند.
مرحله 3: کد آردوینو
قبل از کدنویسی، مهم است که بین اقدامات مختلفی که می خواهید به آنها برسید تفاوت قائل شوید. آردوینو اجازه می دهد تا از چیزی به نام void استفاده کنید . خلأ بخشی از برنامه (خط کد) است که می تواند در هر زمان و در صورت لزوم فراخوانی شود. بنابراین داشتن هر عمل در یک فضای خالی جداگانه، کد را منظم نگه می دارد و کدنویسی را ساده می کند.
Sketch Logics.pdf ضمیمه شده اقداماتی را که میخواهم انجام دهم و منطق پشت آنها را نشان میدهد.
مرحله 4: کد 1 آردوینو - موقعیت خانه راه آهن
اولین فضای خالی برای ارسال ریل به موقعیت Home هنگام راه اندازی کنترلر استفاده می شود.
کنترلر دارای یک سوئیچ تغییر جهت است. هنگام راهاندازی، لغزنده در جهتی که توسط ضامن انتخاب شده است حرکت میکند تا زمانی که به کلید محدود در انتهای ریل برخورد کند. سپس با فاصله ای که کاربر تعریف می کند به عقب برمی گردد (این 0 یا مقداری است که با انتهای مخالف ریل مطابقت دارد). اکنون این موقعیت خانه برای لغزنده است.
