

این پروژه بهروزرسانی یکی از پروژههای اتوماسیون راهآهن مدل قبلی، طرحبندی راهآهن مدل با سایدینگ خودکار است . این نسخه قابلیت کوپلینگ و جداسازی لکوموتیو با وسایل نورد را اضافه می کند. عملکرد طرح راه آهن به شرح زیر است:

- لوکوموتیو از خط اصلی شروع می شود و به سمت سایدینگ می رود تا با وسایل نورد جفت شود.
- لوکوموتیو جفت می شود و قطار را از کناره خارج می کند و به خط اصلی می رساند.
- قطار شروع به حرکت می کند، سرعت می گیرد، چند حلقه در اطراف طرح می گیرد و سرعت خود را کاهش می دهد.
- لوکوموتیو در حلقه نهایی قطار را به سمت کناره برمیگرداند، جایی که از انبار نورد جدا میشود و ادامه میدهد.
- لوکوموتیو یک حلقه در اطراف مسیر ایجاد می کند، سرعت خود را کاهش می دهد و از همان جایی که از ابتدا شروع کرده است متوقف می شود.
- لوکوموتیو برای مدت زمان مشخصی منتظر می ماند و کل عملیات دوباره تکرار می شود.
بنابراین بدون هیچ مقدمه ای، بیایید شروع کنیم!
مرحله 1: ویدیو را تماشا کنید

برای دریافت ایده کامل از نحوه انجام کل عملیات راه آهن که در مرحله قبل توضیح داده شد، ویدیو را تماشا کنید.
مرحله 2: تمام قطعات و اجزای سازنده را دریافت کنید
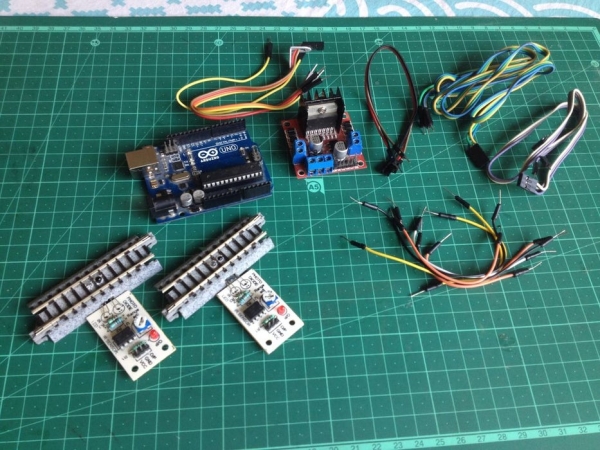
بنابراین اکنون می دانید که کارها چگونه پیش می روند، بنابراین برای شروع، تمام قطعات و اجزای فهرست شده در زیر را دریافت کنید!
- یک میکروکنترلر آردوینو (هر برد آردوینو را می توان استفاده کرد اما مراقب اتصالات پین باشید.)
- یک ماژول درایور موتور L298N (این نوع درایور موتور با توجه به ظرفیت و قیمت آن توصیه می شود.)
- 5 سیم جامپر نر به مادگی (برای اتصال پایه های ورودی درایور موتور به پایه های خروجی دیجیتال برد آردوینو.)
- مجموعه 3 سیم جامپر نر به مادگی، مجموعا 6 عدد (برای اتصال سنسورها به برد آردوینو.)
- 6 سیم جامپر تخته نان (دو تا برای اتصال برق مسیر به یک خروجی درایور موتور و چهار تا برای اتصال دو پیچ سایدینگ به خروجی دیگر درایور موتور.)
- دو آهنگ "حسگر"
- منبع تغذیه 12 ولت (ظرفیت فعلی حداقل 1 آمپر.)
- یک کابل USB مناسب برای اتصال برد آردوینو به کامپیوتر (برای برنامه نویسی).
- یک کامپیوتر (بدیهی است: )
- آهنگ برای ایجاد طرح.
مرحله 3: برنامه آردوینو را در میکروکنترلر آردوینو آپلود کنید
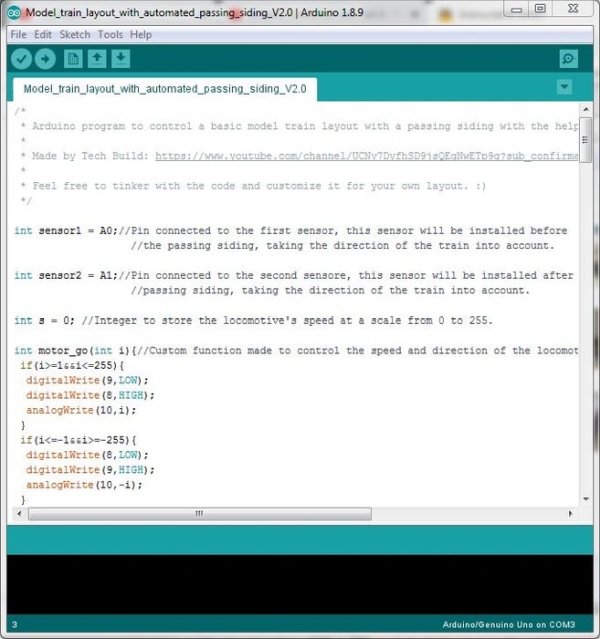
آردوینو IDE را از اینجا دریافت کنید . کد را مرور کنید تا بفهمید عملیات چگونه کار خواهد کرد.
مرحله 4: Layout را بسازید

این طرح شامل یک سایدینگ عبوری با یک مسیر جداکننده مغناطیسی در خروجی سایدینگ خواهد بود تا به لوکوموتیو اجازه دهد قبل از خروج از سایدینگ از انبار نورد جدا شود. یک مسیر "حسگر" درست بعد از سایدینگ نصب می شود تا به میکروکنترلر اطلاع دهد که لوکوموتیو چه زمانی از سایدینگ خارج می شود یا از آن بخش خاص از مسیر عبور می کند.
یک مسیر «حسگر» دیگر قبل از کنارهگیری نصب میشود به طوری که طول مسیر بین این مسیر «حسگر» و کنارهگیری با توجه به جهت حرکت قطار بیشتر از طول قطار باشد.
پس از تنظیم چیدمان، مطمئن شوید که ریل های مسیر تمیز هستند تا از حرکت روان قطار مطمئن شوید.
مرحله 5: Turnouts را به درایور موتور متصل کنید
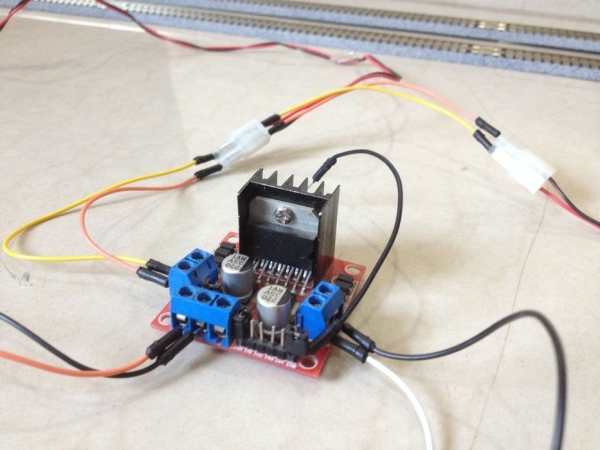
هر دو چرخش را به صورت موازی (+ve و -ve یکی به ترتیب به +ve و -ve دیگری) وصل کنید. پیچ های سیمی موازی را به پین های خروجی ماژول درایور موتور با علامت "OUT1" و "OUT2" وصل کنید. اگر موتور پس از روشن کردن راهاندازی به جهت اشتباه تغییر مسیر داد، ممکن است لازم باشد اتصال چرخش خروجی را به خروجی موتور برگردانید.
مرحله 6: درایور موتور را به تغذیه کننده برق مسیر متصل کنید
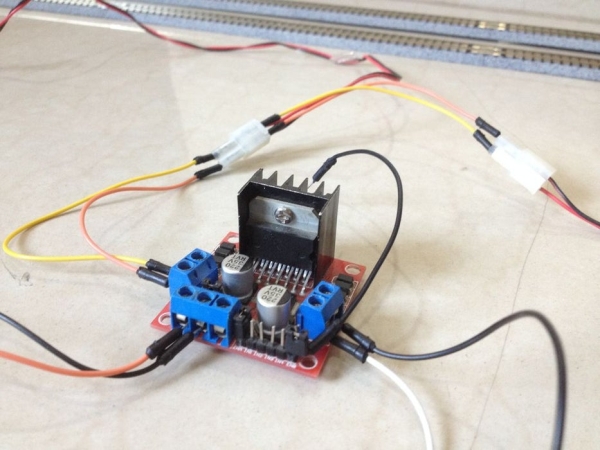
سیم های تغذیه کننده برق مسیر را به پین های خروجی درایور موتور با علامت "OUT3" و "OUT4" وصل کنید. اگر لوکوموتیو پس از روشن کردن دستگاه شروع به حرکت در جهت اشتباه کرد، ممکن است لازم باشد قطبیت اتصال سیمکشی را معکوس کنید.
منبع: مدل طرح راهآهن با کنارههای عبور خودکار (V2.0)
