

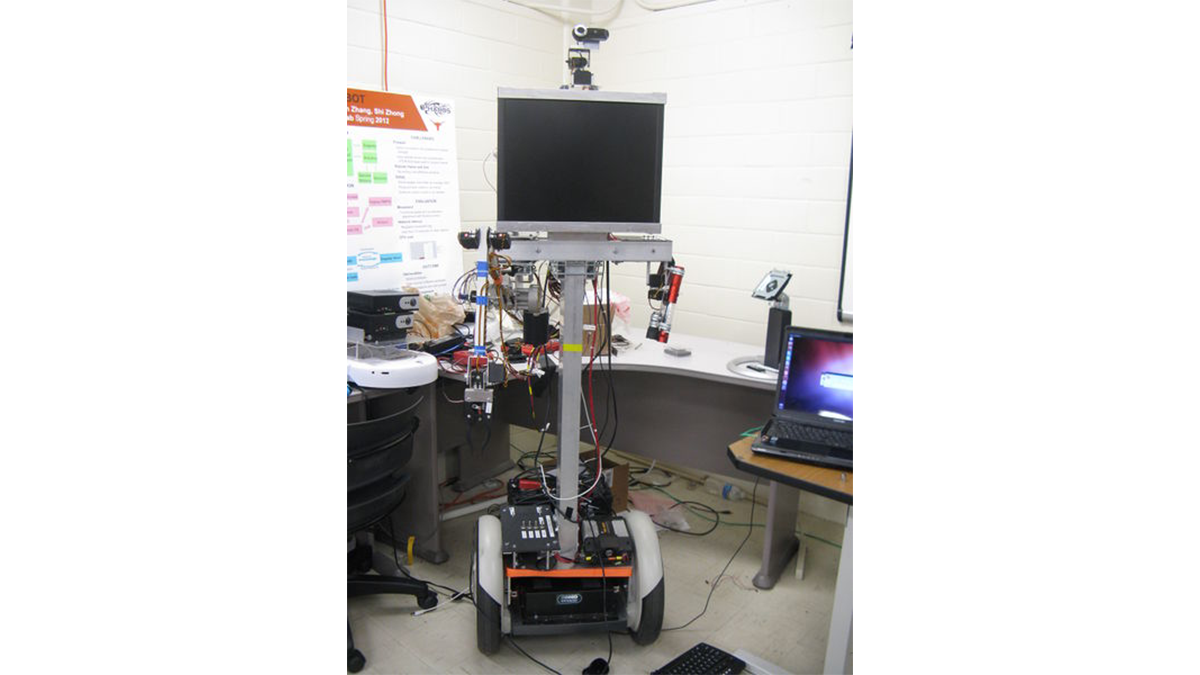
این صفحه مستندات پروژه DIY Telepresence بهار 2012 است. در اینجا شماتیک ها، نرم افزارها و راهنماهای ربات را خواهید دید. هدف این پروژه طراحی یک ربات حضور دوردست کم هزینه و آسان بود. برخی از ویژگی ها عبارتند از:
هواپیمای متحرک مبتنی بر Segway
بازوی ربات
قاب آلومینیومی
کنفرانس ویدئویی دو طرفه با استفاده از پروتکل WebRTC
کنترل از راه دور ربات
HTML5 با قابلیت پیکربندی پویا کنترل سیستم عامل ربات رابط کاربری وب
(ROS) با رابط آردوینو
این پروژه بین پاییز 2011 تا بهار 2012 انجام شد و توسط پنج عضو تیم توسعه یافت: Daniel Kuo، Tri Nguyen، Dec Rachatasumrit، Michael Zhang و William Zhong.
فهرست
1 گزارش طراحی نهایی
2 راهنما
2.1 سخت افزار
2.2 نرم افزار
3 ربات الکترونیک و سیستم قدرت
3.1 نمودار شماتیک الکتریکی
3.2 نحوه روشن کردن Electronics
4 ساخت قاب
4.1 تنظیم ارتفاع
5 بازوی ربات
گزارش نهایی طراحی
DIY Telepresence گزارش ربات
راهنمای
سخت افزار
DIY Robot Electronics and Power System
نمودار شماتیک الکتریکی
DIY نحوه روشن کردن Electronics
DIY Height Adjustment
بازوی ربات DIY
و غیره…
نرم افزار
معماری نرم افزار DIY
Telepresence طراحی HTML5 Telepresence DIY
ربات الکترونیک و سیستم قدرت
بیشتر وسایل الکترونیکی روی ربات از باتری 12 ولتی سرب-اسید دریایی تغذیه می شوند. استثناها شامل Segway و لپ تاپ هستند که هر دو دارای باتری های لیتیوم یون جداگانه هستند. قطعات الکترونیکی از طریق یک پنل "کنترل قدرت اصلی" کنترل می شوند که نیرو را به زیرسیستم های ربات توزیع می کند:
