

این دستورالعمل به شما نشان می دهد که یک سپر آردوینو بسازید که می توان از آن برای کنترل 3 سروو و 1 موتور پله ای با استفاده از 4 پتانسیومتر استفاده کرد. شما نیاز خواهید داشت:
دسترسی به پرینتر لیزری/روتر cnc/مواد شیمیایی اچینگ
بلوک ترمینال 7 پین 3.5 میلی متری
بلوک ترمینال 2 پین 3.5 میلی
متری 2 پین 3.5 میلی متری 2 هدر 8 پین قابل انباشته
2 هدر 6 پین قابل انباشته
1 سوکت تراشه 8 پین
1 درایور موتور L293D تراشه
اختیاری: دسترسی به لحیم کاری برش لیزری
لحیم
کاری آهن
لحیم کاری برای شکل دادن به تخته، به عنوان مثال سنباده دیسکی
مرحله 1: صفحه را اچ کنید
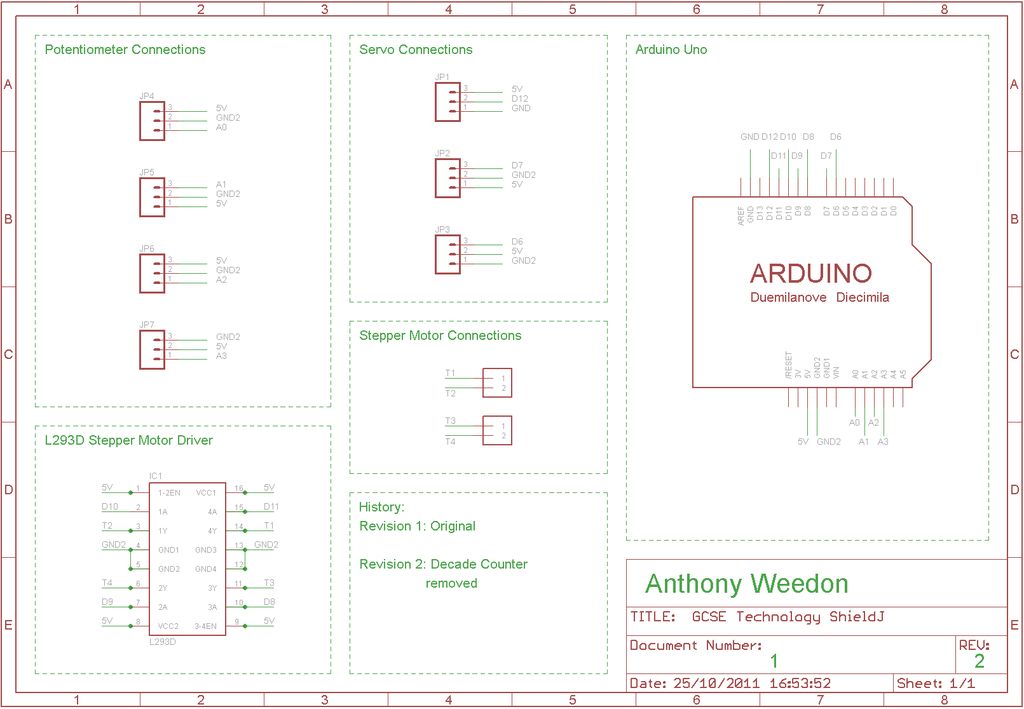
فایل های Eagle برای طرح شماتیک و PCB برد پیوست شده است. یک طرفه است و باید حکاکی یا آسیاب شود.
 GCSE Technology Shield.sch 33 KBGCSE Technology Shield.brd 60 KB
GCSE Technology Shield.sch 33 KBGCSE Technology Shield.brd 60 KBمرحله 2: تخته را سوراخ کنید
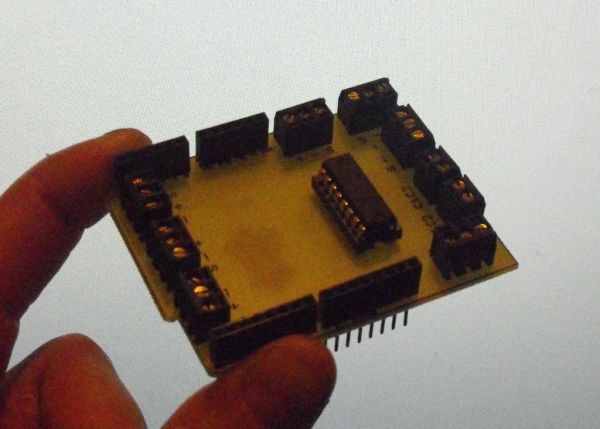
گام بعدی این است که سوراخهای اجزا را با دقت سوراخ کنید. در زیر تصویری از تخته سوراخ شده است. سوراخ کردن قبل از شکل دادن به این معنی است که می توانیم تخته را برای حکاکی لیزری تراز کنیم.
مرحله 3: تخته را با لیزر اچ کنید
این مرحله اختیاری است، اما شکل تابلو و مقداری متن مفید را در بالای تابلو ارائه می دهد. در زیر فایل طراحی دو بعدی و همچنین یک DXF وجود دارد. سخت ترین بخش تمام این پروژه، خط کشی لیزر است. من در امتداد خط سوراخ هایی که باید سوراخ می کردی خط کشیدم و با استفاده از کاتر لیزری مسیر را بدون برش دنبال کردم تا ببینم جای درستی است یا نه. وقتی خوشحال هستید، نوشته را روی سطح برد حکاکی کنید (من می توانم توصیه کنم تنظیمات را روی PCB قدیمی آزمایش کنید).
مرحله 4: تخته را شکل دهید
اکنون باید یک طرح کلی در بالای تخته حک کنید. همانطور که تصویر مرحله قبل نشان می دهد، یا لبه ها را با دیسک سنباده بزنید یا از روش دیگری استفاده کنید، اما تخته را مطابق طرح شکل دهید. من از یک دیسک برش مته کوچک برای جزئیات ریز استفاده کردم.
اختیاری است: دسترسی به
آهن لحیم کاری برش لیزری
برای جزئیات بیشتر: استپر موتور آردوینو و محافظ سروو
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
This instructable will show you show to build an Arduino shield which can be used to control 3 servos and 1 stepper motor using 4 potentiometers. You will need:
