

این دستورالعمل برای ورود به چالش روبات ایجاد شده است . اگر من برنده شوم، مطمئناً قطعات به رباتهایی مانند این خواهند رفت. نکاتی در مورد نحوه گنجاندن برخی از مؤلفهها در بستههای جایزه در مرحله آخر آورده شده است. من 28 ساله هستم، پس البته برای جوایز دانشجویی نمی روم.
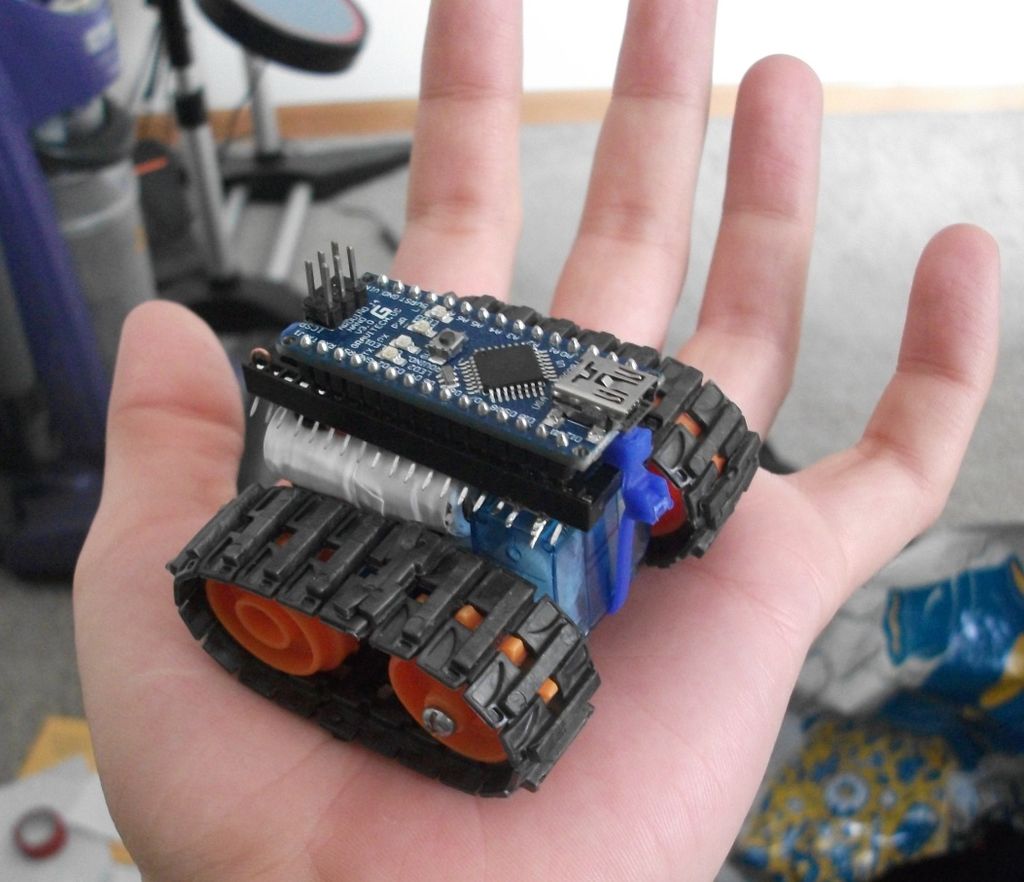
من این را به عنوان یک پروژه ساده برای کسانی که تازه در رباتیک شروع کرده اند ایجاد کردم. نسبتاً ارزان است، به حداقل ابزار نیاز دارد و ساخت آن آسان است. پس از اتمام کار، یک پلت فرم روباتیک قابل گسترش دارید که در کف دست شما قرار می گیرد و می توان به راحتی در محیط آردوینو برنامه ریزی کرد.
اینجا رانندگی در یک مثلث است، بدون هیچ افزودنی خاصی
در دستورالعملها، من به شما توضیح خواهم داد که چگونه:
- سرووها را برای چرخش مداوم تغییر دهید
- هاب های مسیر را روی سرووها قرار دهید
- یک بسته باتری سفارشی بسازید
- آن را با چند اتصال سیم کشی کنید
- آن را جمع کنید
- آن را برنامه ریزی کنید
- شخصی سازی
این و سایر موارد اضافه شده را می توان با هم ترکیب کرد تا ربات میکرو سفارشی خود را بسازید
برای پلتفرم اصلی، لوازم زیر مورد نیاز است:
یک آردوینو نانو،
یک باتری قابل شارژ کوچک،
یک جفت سروو 9 گرمی، اصلاح شده برای چرخش مداوم
بخشی از یک مسیر Tamiya،
یک سوکت 40 پین،
یک پاک کن لاستیکی
و چند زیپ
مرحله 1: ساخت: سرووها را اصلاح کنید
میکرو سرووهای اصلاح شده برای چرخش مداوم قلب این طراحی هستند. آنها مقدار زیادی از سخت افزار را به شما می دهند. موتورها، گیربکس، درایور و مدار کنترل، همه در یک بسته بندی ارزان قیمت کوچک هستند و در این پیاده سازی نیز به عنوان قاب ربات عمل می کنند (در مرحله بعد مشاهده می شود). دستورالعمل های زیادی در مورد اصلاح سرووها برای چرخش مداوم وجود دارد. اما در اینجا این است که چگونه این کار را برای سرووهای میکرو 9 گرمی که استفاده می کنم انجام دادم.
تصاویر:
- پیچ های ریز را بردارید و جعبه را باز کنید
- سیم های پتانسیومتر را برش دهید، اینها محل اتصال مقاومت ها هستند
- اگر مقاومت های نصب سطحی دارید، اگر یک جفت مقاومت سوراخ مانند این را نپیچانید، یک 5k (1k تا 10k باید کار کند) روی پد از هر یک از پدهای جانبی تا پد میانی قرار دهید.
- با استفاده از چند انبر کوچک نقطه توقف پتانسیومتر را بشکنید، برای استفاده از گلدان به عنوان یک یاتاقان چرخشی نیاز دارید.
- روی مقاومتها را لحیم کنید، اگر از یک جفت سوراخ سوراخ استفاده میکنید، توصیه میکنم آنها را در نوار برقی مانند آن قرار دهید. برای سروویی که در جلو می رود، یک بریدگی برای خروج سیم از کناره ببرید تا از زیر ربات خارج نشود.
- (نشان داده نشده است) قبل از بستن، یک سوراخ در قسمت پشتی کیس در مقابل اسپلاین ایجاد کنید تا چرخ بیکار (چرخ بدون دندان) را سوار کنید.
- از چند برش زاویه یا انبردست برای جدا کردن فلنجهای نصب از کیسها استفاده کنید و برآمدگیهایی را که میگذارند سوهان بزنید یا سنباده بزنید، اینها میتوانند بعداً مانع شوند.
مرحله 2: ساخت: هاب ها را به اندازه سوراخ کنید
- ساقه ها را روی توپی ها برش دهید تا در هنگام نصب فقط از لبه داخلی مسیرها بچسبند. این کار را می توان با اره چاقوی سرگرمی یا اره مقابله ای انجام داد. مواظب باش دستت را بریده نکنی! برای ایمنی، توپی را روی یک تخته برش در کنار آن با انگشتانم در طرف دیگر چرخ از ساقه نگه داشتم، و سپس آن را در مقابل تخته برش چرخاندم و چاقو را در امتداد آن می کشید، به این ترتیب اگر لغزید، فقط هک می کنید. تخته.
- سوراخی را برای پیچ که آن را روی سروو در درپوش چرخ محرک (چرخ های دندانه دار) نگه می دارد، دریل کنید. ممکن است از پیچ توپی همراه سروو استفاده کنید. از هر پیچی که در سروو اسپلاین استفاده میکنید، آن را سوراخ کنید تا جا بیفتد.
- از آنجایی که هاب های کوچک Tamiya روی انتهای سروو قرار نمی گیرند، باید آنها را به اندازه سوراخ کنید. از آنجایی که اینها کوچک هستند و از قبل دارای سوراخ هستند، نیازی به پرس مته ندارید، اما به چیزی برای بستن آن نیاز دارید. سرووها در اندازه اسپلاین متفاوت هستند، بنابراین نمی توانم اندازه دقیقی برای استفاده در اختیار شما قرار دهم. من به شما پیشنهاد می کنم کمی کوچک بروید و آن را بالا ببرید تا توپی محکم شود، اینها گشتاور را منتقل می کنند. همچنین باید مراقب عمق باشید تا توپی ها به بدنه سروو ساییده نشوند. اسپلاین سروو خود را اندازه بگیرید و عمق سوراخ نصب را کمی کمتر از این کنید. من روش قرار دادن نوار ماسک را در اطراف مته خود در عمقی که می خواهید متوقف کنید، پیشنهاد می کنم. سپس می توانید قبل از دریل کردن آن را در کنار سروو اسپلاین نگه دارید تا اطمینان حاصل کنید که کمی کمتر است.
- برای نصب هاب ها، هرزگرد باید با استفاده از یکی از پیچ های کیت Tamiya یا پیچ دیگری با طول مناسب وصل شود، من از جار سخت افزاری تصادفی خودم گرفتم و اندازه خاصی ندارد. آنقدر آن را سفت کنید که چرخ را به سمت پایین نیشگون نگیرد.
- در طرف دیگر، از یکی از پیچهایی که به همراه سرووها از سوراخ چرخ راننده میآیند، استفاده کنید تا آن را محکم کنید.
مرحله 3: ساخت: بسته باتری را بسازید
