

سنسور اولتراسونیک (HC-SR04) معمولاً برای یافتن فاصله یک جسم از یک نقطه خاص استفاده می شود. انجام این کار با آردوینو نسبتاً آسان بوده و کد نیز بسیار ساده است. اما در این مقاله قصد داریم چیز متفاوتی را با این سنسورهای محبوب HC-SR04 امتحان کنیم. ما سعی می کنیم فاصله بین دو سنسور اولتراسونیک را محاسبه کنیم ، یعنی یک سنسور را به عنوان فرستنده و سنسور دیگر را به عنوان گیرنده عمل می کنیم. با انجام این کار میتوانیم موقعیت یک فرستنده را با استفاده از گیرندههای اولتراسونیک ردیابی کنیم . یافتن فاصله بین دو حسگر آمریکایی ممکن است کار نسبتاً ساده ای به نظر برسد، اما من با چالش های کمی روبرو شدم که در این پروژه مورد بحث قرار گرفته است.
تکنیک مورد بحث در این مقاله نسبتاً دقیق نیست و ممکن است در هیچ سیستم واقعی بدون تغییرات مفید نباشد. در طول این مستندسازی، هیچکس را پیدا نکردم که به اندازه نتایج من باشد، بنابراین من فقط نظرات خود را در مورد اینکه چگونه آن را به کار انداختم به اشتراک گذاشتم تا افرادی که این کار را انجام می دهند نیازی به اختراع مجدد چرخ نداشته باشند.
مواد مورد نیاز:
- آردوینو (2 Nos) - هر مدلی
- ماژول HCSR04 (2 Nos)
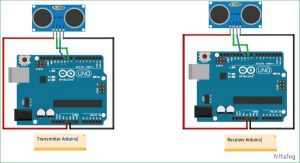
حتی اگر قرار است یکی از سنسورهای ایالات متحده (التراسونیک) را به عنوان فرستنده و دیگری به عنوان گیرنده کار کنیم، اجباری است که هر چهار پایه سنسور را به آردوینو متصل کنید. چرا باید؟ بیشتر در مورد آن بعدا بحث خواهد شد.
همانطور که می بینید نمودار مدار فرستنده و گیرنده هر دو یکسان هستند. همچنین بررسی کنید: رابط سنسور آلتراسونیک آردوینو
ماژول HC-SR04 چگونه عمل می کند:
قبل از اینکه ادامه دهیم، اجازه دهید نحوه عملکرد سنسور HC-SR04 را درک کنیم .
سنسور دارای دو پایه Trigger و Echo است که برای اندازه گیری فاصله همانطور که در نمودار زمان بندی نشان داده شده است استفاده می شود. ابتدا برای شروع اندازهگیری، باید یک موج اولتراسونیک از فرستنده ارسال کنیم، این کار را میتوان با تنظیم بالای پایه ماشه برای 10uS انجام داد. به محض انجام این کار، پین فرستنده 8 انفجار صوتی از امواج ایالات متحده را ارسال می کند. این موج ایالات متحده به شیئی برخورد می کند که به عقب باز می گردد و توسط گیرنده دریافت می شود.
در اینجا نمودار زمانبندی نشان میدهد که هنگامی که گیرنده موج را دریافت میکند، باعث میشود که پین اکو برای مدت زمانی بالا برود که برابر با زمانی است که موج از حسگر ایالات متحده حرکت میکند و به سنسور باز میگردد. به نظر نمی رسد این نمودار زمان بندی درست باشد .
من قسمت Tx (فرستنده) سنسورم را پوشاندم و بررسی کردم که آیا پالس اکو بالا رفته است یا خیر، و بله بالا می رود. این بدان معنی است که پالس اکو منتظر دریافت موج ایالات متحده (اولتراسونیک) توسط آن نیست. هنگامی که موج ایالات متحده را ارسال می کند، بالا می رود و تا زمانی که موج به عقب برگردد بالا می ماند. بنابراین نمودار زمان بندی صحیح باید چیزی شبیه این باشد که در زیر نشان داده شده است (با عرض پوزش برای مهارت های نوشتاری ضعیف من).
بیشتر بخوانید: نحوه اندازه گیری فاصله بین دو سنسور اولتراسونیک
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Ultrasonic sensor (HC-SR04) is commonly used to find the distance of an object from one particular point. It has been fairly easy to do this with the Arduino and the code is also pretty simple. But in this article we are going to try something different with these popular HC-SR04 sensors. We will try calculating the distance between two Ultrasonic sensors that is, we will make one sensor to act as transmitter and the other sensor to act as receiver. By doing this we can track the location of one transmitter using many ultrasonic receivers this tracking is called triangulation and can be used for automatic docking robots luggage followers and other similar application. Finding the distance between two US sensors might sound to be a fairly simple task but I faced few challenges which are discussed in this project.
