در این پروژه نشانگر و کنترل کننده خودکار سطح آب مبتنی بر آردوینو، قصد داریم با استفاده از سنسورهای اولتراسونیک سطح آب را اندازه گیری کنیم. اصل اساسی اندازه گیری فاصله اولتراسونیک بر اساس ECHO است. هنگامی که امواج صوتی در محیط منتقل می شوند، پس از برخورد به هر مانعی به صورت ECHO به مبدأ باز می گردند. بنابراین ما باید فقط زمان سفر آن را برای هر دو صدا به معنای زمان خروج و زمان بازگشت به مبدا پس از برخورد به هر مانعی محاسبه کنیم. و بعد از مقداری محاسبه می توانیم نتیجه ای بدست آوریم که مسافت است. این مفهوم در پروژه کنترل آب ما استفاده می شود که در آن پمپ موتور آب به طور خودکار هنگامی که سطح آب در مخزن پایین می آید روشن می شود. همچنین می توانید این مدار ساده نشانگر سطح آب را برای نسخه ساده تری از این پروژه بررسی کنید.
اجزاء
- آردوینو اونو
- ماژول حسگر اولتراسونیک
- LCD 16×2
- رله 6 ولت
- ULN2003
- 7806
- PVT
- سیم مسی
- باتری 9 ولت یا 12 ولتاداپتور
- سیم های اتصال
ماژول سنسور اولتراسونیک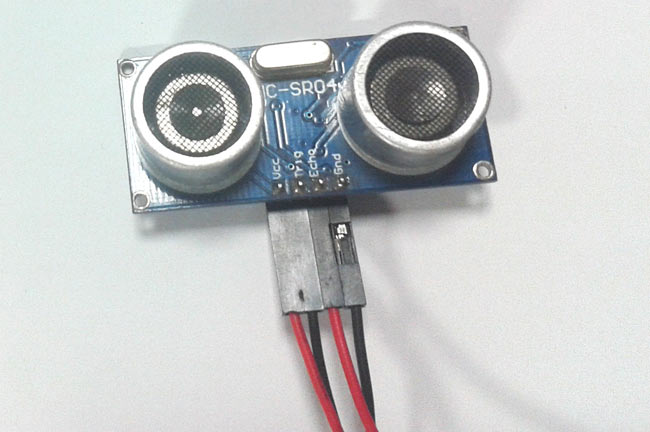
سنسور اولتراسونیک HC-SR04 برای اندازه گیری فاصله در محدوده 2 سانتی متر تا 400 سانتی متر با دقت 3 میلی متر استفاده می شود. ماژول سنسور از فرستنده اولتراسونیک، گیرنده و مدار کنترل تشکیل شده است.
ماژول حسگر اولتراسونیک بر روی پدیده طبیعی ECHO صدا کار می کند. یک پالس برای حدود 10 us ارسال می شود تا ماژول را راه اندازی کند. پس از آن ماژول به طور خودکار 8 سیکل سیگنال اولتراسوند 40 کیلوهرتز را ارسال می کند و اکو آن را بررسی می کند. سیگنال پس از برخورد با مانع برمی گردد و توسط گیرنده گرفته می شود. بنابراین فاصله مانع از سنسور به سادگی با فرمول داده شده محاسبه می شود
فاصله= (زمان x سرعت)/2.
در اینجا حاصل ضرب سرعت و زمان را بر 2 تقسیم کرده ایم زیرا زمان کل زمان رسیدن به مانع و بازگشت به عقب است. بنابراین زمان رسیدن به مانع فقط نصف کل زمان صرف شده است.
کارکرد کنترل کننده سطح آب اتوماتیک
کار این پروژه بسیار ساده است ما از ماژول حسگر اولتراسونیک استفاده کرده ایم که امواج صوتی را در مخزن آب ارسال می کند و انعکاس امواج صوتی که ECHO است را تشخیص می دهد. اول از همه باید ماژول حسگر اولتراسونیک را برای انتقال سیگنال با استفاده از آردوینو فعال کنیم و سپس منتظر دریافت ECHO باشیم. آردوینو زمان بین راه اندازی و دریافت ECHO را می خواند. می دانیم که سرعت صوت حدود 340 متر بر ثانیه است. بنابراین با استفاده از فرمول داده شده می توانیم فاصله را محاسبه کنیم:
فاصله= (زمان سفر/2) * سرعت صوت
جایی که سرعت صوت تقریباً 340 متر در ثانیه است.
با استفاده از این روش از حسگر تا سطح آب فاصله می گیریم. پس از آن باید سطح آب را محاسبه کنیم.
اکنون باید طول کل مخزن آب را محاسبه کنیم. همانطور که طول مخزن آب را می دانیم، می توانیم سطح آب را با کم کردن فاصله حاصل از امواج فراصوت از طول کل مخزن محاسبه کنیم. و فاصله سطح آب را بدست می آوریم. اکنون می توانیم این سطح آب را به درصد آب تبدیل کنیم و می توانیم آن را روی LCD نمایش دهیم. کار پروژه کامل نشانگر سطح آب در بلوک دیاگرام زیر نشان داده شده است.
نمودار مدار و توضیح
همانطور که در مدار کنترل کننده سطح آب ارائه شده در زیر نشان داده شده است، پین های ماشه و اکو ماژول سنسور اولتراسونیک مستقیماً به پایه 10 و 11 آردوینو متصل می شوند. یک LCD 16×2 به آردوینو در حالت 4 بیتی متصل می شود . پایه های کنترل RS، RW و En مستقیماً به پایه 7، GND و 6 آردوینو وصل می شوند. و پایه داده D4-D7 به 5، 4، 3 و 2 آردوینو وصل می شود و زنگ در پایه 12 وصل می شود. رله 6 ولتی است. همچنین در پایه 8 آردوینو از طریق ULN2003 برای روشن یا خاموش کردن پمپ موتور آب وصل شده است. یک رگولاتور ولتاژ 7805 نیز برای تامین 5 ولت به رله و مدار باقی مانده استفاده می شود.