

بینایی یکی از هیجان انگیزترین حس هایی است که می توانید به ربات خود بدهید. توانایی درک موانع به یک ربات اجازه می دهد تا تصمیمی آگاهانه در مورد حرکات بعدی بگیرد.
با این حال، به چند دلیل، اجرای آن آسانترین حس نیست. اولاً، وقتی صحبت از محاسبات به میان می آید، بینایی را می توان به یک بردار دو بعدی انتزاع کرد، در مقابل یک اسکالر تک بعدی مانند، مثلاً، دما. ثانیاً، این یک مقدار آنالوگ است مانند بسیاری از حواس دیگر، بنابراین به درجه خاصی از دیجیتالی شدن و پردازش نیاز دارد تا آن را برای رایانه معنادار کند. در نهایت، اگرچه این یک مشکل جدی نیست، تجسم است. داده های بینایی را نمی توان به عنوان اعداد صرف برای انسان نشان داد. اگرچه کامپیوترها اینگونه داده ها را پردازش می کنند، اما رمزگشایی ارقام برای انسان منطقی نیست. با این حال، با کمک فن آوری مدرن، و دانش اولیه فیزیک و ریاضی، ما می توانیم ربات خود را با استعداد بینایی وقف کنیم!
مرحله 1: تئوری
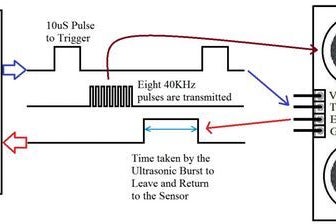
در این پروژه از حسگر فاصله سنج اولتراسونیک استفاده می کنیم. امواج صوتی فراتر از محدوده شنوایی انسان تولید می کند و فاصله را با محاسبه زمان مورد نیاز این امواج برای برخورد با مانع و بازگشت به عقب اندازه گیری می کند. این شبیه به اصل مورد استفاده خفاش ها است.
یکی دیگر از قطعاتی که قرار است از آن استفاده کنیم سروو موتور است. تفاوت آن با موتور DC معمولی این است که می تواند بسیار دقیق به یک موقعیت زاویه ای معین بچرخد و حالت خود را در آنجا حفظ کند. هنگامی که به یک سروو موتور پالس هایی با مدت زمان مشخص داده می شود، به موقعیت زاویه ای مربوطه حرکت می کند.
ما از هر دو این مؤلفه ها برای بدست آوردن میدان دید 180 درجه برای ربات خود استفاده خواهیم کرد.
مرحله 2: جمع آوری مواد
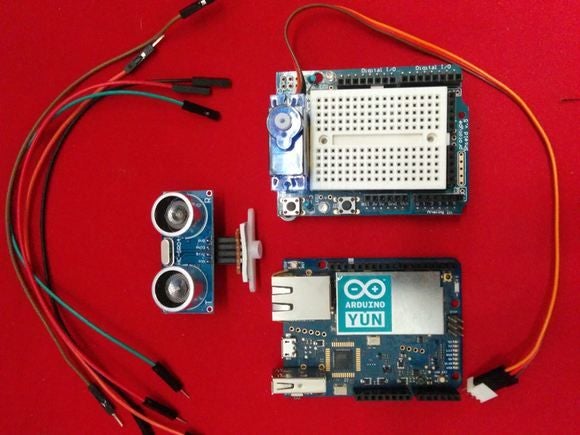
این پروژه از سخت افزار زیر استفاده می کند
- Arduino Uno/Yun (لطفاً توجه داشته باشید که هر برد ردپای آردوینو را می توان به جای Uno یا Yun استفاده کرد)
- Prototyping Shield آردوینو
- سنسور اولتراسونیک HC-04
- یک موتور سروو (من از Tower Pro SG90 استفاده کردم زیرا بسیار فشرده است)
در بخش نرم افزار ما از برنامه های زیر استفاده می کنیم
- Arduino IDE برای آپلود کد کنترلی در آردوینو برای چرخاندن سروو و دریافت اطلاعات فاصله از سنسور اولتراسونیک و همچنین فشار دادن آن به پورت سریال.
- Mathworks MatLab برای دریافت داده ها از خط سریال، پردازش و تجسم آن به یک نمودار.
مرحله 3: مونتاژ مکانیکی
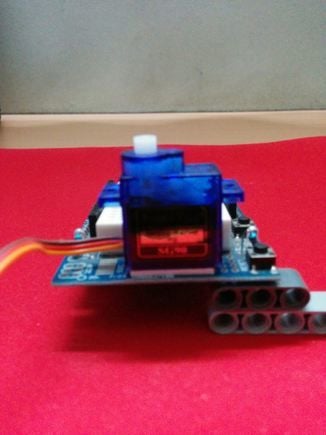
با استفاده از یک قطعه کوچک PCB عمومی، یک هدر کوچک برای HC-04 بسازید و آن را با استفاده از یک تکه نوار دو طرفه به یک سروو هورن متصل کنید.
این مرحله اختیاری است، اما برای فشردهتر کردن سیستم، من سروو را با استفاده از نوار دو طرفه به قسمت برآمدگی محافظ پروتوبرد وصل کردهام.
نتیجه نهایی باید شبیه شکم Wall-E باشد.
