

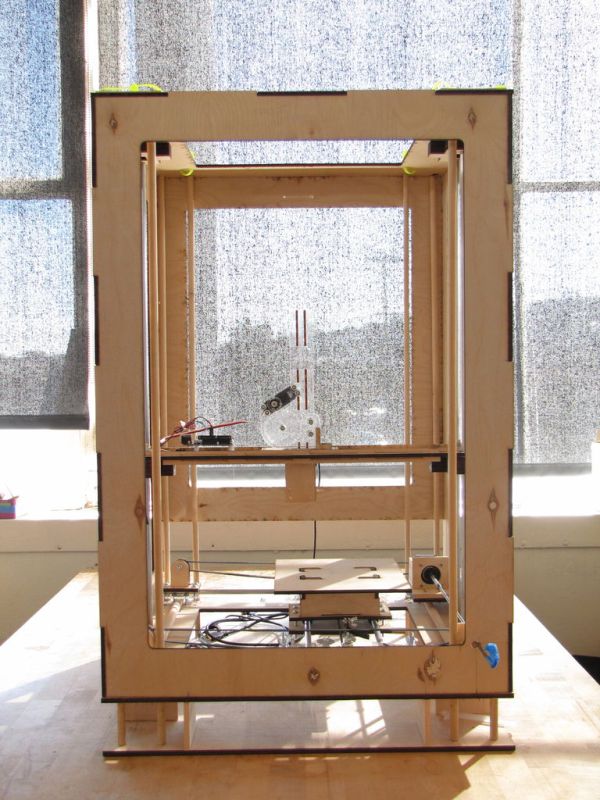
ما سه دانشجو از کالج هنر کالیفرنیا در سانفرانسیسکو در برنامه معماری هستیم. این استودیو Creative Architecture Machines نام دارد و توسط Jason Johnson و Michael Shiloh تدریس می شود. وبستر یک ماشین بافندگی الگوی هندسی است که از کاشی کاری های اسلامی، ساخت گنبدهای ژئودزیکی، ماشین های بافندگی و چاپگرهای سه بعدی معمولی الهام گرفته است. این ربات 3 محوره یک اکتشاف در کنترل هندسی موتورهای پلهای، تنوع بافت اکستروژن چسب داغ، و بافندگی وجوه از طریق تفاوت چگالی تولید شده توسط اسکریپت و تکرار فرم بود. با مهار ظرفیت ساختاری بافت چسب، حرکت موتور محور z و تغییرپذیری بافت، وبستر برای نمونهسازی سریع گنبدها از طریق یک فرآیند شبکهمانند افزودنی استفاده شد.
لطفاً برای اطلاعات تصویری بیشتر در مورد فرآیند و محصول نهایی، ویدیوی پیوست را مشاهده کنید. اگر علاقه مند به اطلاعات بیشتر در مورد فرآیند هستید یا هر گونه سوالی در مورد راه اندازی دارید، لطفاً با ما تماس بگیرید. ما دوست داریم نظرات یا پیشنهادات را نیز بشنویم.

کاسوندرا استیونز، کولت ریکسی و مگان فریمن
مرحله 1: آنچه شما نیاز دارید
مواد تشکیل دهنده
برای بدن…
(5) کمربندهای چاپگر سه بعدی. می توانید کمربند یک طول سفارش دهید و آن را به 5 تکه جدا کنید.
(10) قرقره ها. مطمئن شوید که آنها با تسمه های چاپگر مناسب هستند.
(6) میله های آلومینیومی (5/32 اینچ D). ارتفاع میله بستگی به ارتفاع محور Z مورد نظر شما دارد.
(2) رولپلاک های چوبی 0.5 اینچی. همان طول پایه.
(2) میله های فولادی. قطر باید با قطر سر موتور مطابقت داشته باشد. طول میله بستگی به عرض پایه دارد. مال ما 18 اینچ بود.
(2) لوله آلومینیومی بلند 3 اینچی. این باید به خوبی روی میله فولادی و سر موتور قرار گیرد (این دو را به هم متصل می کند).
(2) اسپیسر اکریلیک. قطر باید با اندازه پیچ استاندارد انتخاب شده مطابقت داشته باشد. ما از 6/32 اینچ D.
(10) یاتاقان های خطی استفاده کردیم. اینها باید کاملاً روی میله های آلومینیومی 5/32 اینچی D بچرخند.
(3) ورق های 1/4 اینچی تخته سه لا (24 اینچ در 48 اینچ)
پیچ 6/32 اینچی.
ما 3 جعبه 100 پیچ در طول های مختلف 0.75 اینچ 1 اینچ، 1.25 اینچ (100) مهره قفلی
(16) بال مهره خریدیم . برای اینکه بتوانید کمربند را تنظیم کنید.
(100) واشر، نایلون و
مجموعه فلزی از گیره های لاستیکی کوچک برای دستان اضافی شما.
برای اکسترودر...
(1) تفنگ مینی چسب دما پایین. شما باید چندین نسخه پشتیبان بخرید. ما از طریق 10.
Tooons از چسب حرارتی
(4) چرخ دنده. اندازه های مختلف.
ورق 1 x 1 1/8 اینچ اکریلیک یا
پیچ چوبی 6/32 اینچ D. می توانید از پیچ هایی که برای بدنه درج شده است استفاده کنید.
بسته های چندگانه مینی چسب مینی چسب
الکترونیکی 0.27 قطر ...
(3) استپر موتور، یکی تک سر و دو سر دو سر
(1) سروو موتور حلقه پیوسته
(1) درایور موتور چهار محافظ
(1) فن کامپیوتر کوچک
(3) گرما هدرهای
زن غرق می شود. لحیم کردن به درایور موتور
(2) آهن و لحیم کاری
سیم رشته ای آداپتور برق 12 ولت (2) سپر خالی آردوینو Uno (1) تعداد زیپ بند
مرحله 2: ساختن پایه (X و Y)
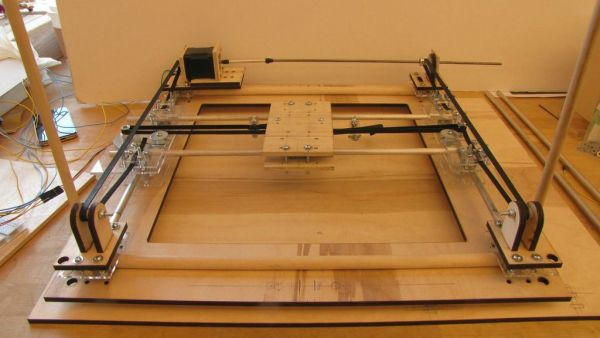
از پایین شروع کنید و افزایش دهید.
یک تکه 19 اینچ در 23 اینچ از تخته سه لا 1/4 اینچی را برش دهید. این پایه ای برای استراحت دستگاه است.
ساختار تخت X و Y را برش دهید، یک مربع تخته سه لا 19 اینچ در 19 اینچ x 1/4 اینچ D با سوراخ 13 اینچ در 13 اینچ از مرکز بریده شده است.
شما باید 4 مجموعه از سوراخ ها را در هر گوشه برش دهید. لطفا به فایل لیزری پیوست مراجعه کنید.
باقی مانده قطعات را روی فایل لیزری برش دهید. لطفا برای مونتاژ به تصویر مراجعه کنید.
قطعات "A" را در گوشه ها پیچ کنید تا رولپلاک های چوبی را محکم کنید.
میله های آلومینیومی را عمود بر رولپلاک های چوبی قرار دهید.
اطمینان حاصل کنید که 2 یاتاقان خطی را روی هر میله آلومینیومی قبل از محکم کردن آن قرار دهید.
میله های آلومینیومی ساندویچ بین قطعات "A" و "B". این کار را در هر گوشه انجام دهید.
قطعات "C" عمودی را در 3 گوشه اضافه کنید. گوشه چهارم دارای دو قطعه عمودی "D" است که موتور X را در جای خود قرار می دهد.
از طریق هر جفت زبانه "C" یک پیچ را با یک فاصله نایلون روی آن بچرخانید.
دو میله آلومینیومی باقیمانده را عمود بر میله هایی که مستقیماً زیر آنها قرار دارند قرار دهید. قبل از محکم کردن، مطمئن شوید که یک یاتاقان خطی را روی هر کدام از اینها بلغزانید. لطفاً برای مشاهده نحوه اتصال میله های آلومینیومی به یکدیگر به تصویر مراجعه کنید.
حالا شما تخت را وصل می کنید. یاتاقانهای خطی باید مستقیماً روبهروی یکدیگر قرار گرفته و توسط تخت در جای خود قرار گیرند.
برای جزئیات بیشتر: Webster: A Geometric Pattern Weaving Machine
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
We are three students from California College of the Arts in San Francisco in the Architecture program. This studio is called Creative Architecture Machines and is taught by Jason Johnson and Michael Shiloh. Webster is a geometric pattern weaving machine that takes inspiration from Islamic tiling, geodesic dome construction, weaving machines, and conventional 3D printers. This 3-axis robot was an exploration in the geometric control of stepper motors, the texture variability of hot glue extrusion, and weaving facets through script-generated density difference and form repetition. Harnessing the structural capacity of the glue texture, the movement of the z-axis motor, and the variability of the weave, Webster was used to rapid-prototyping domes through an additive web-like process.
