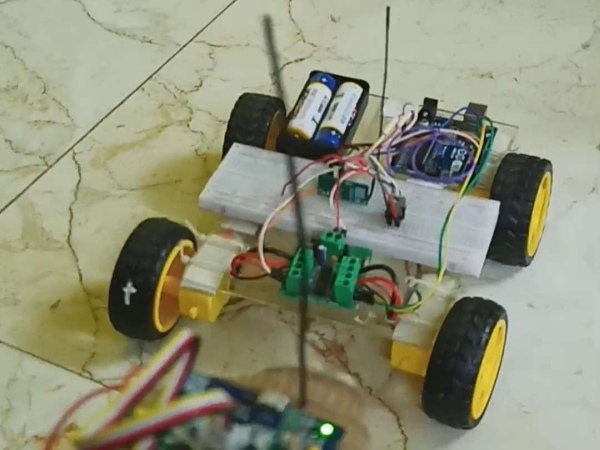
پانتومیم یک واحد کنترل کننده حرکتی قابل تنظیم است که می تواند برای تعامل قابل اعتماد انسان و ماشین استفاده شود. برای هدف نمایشی، ما یک مورد استفاده از پانتومیم را در یک شاسی 4WD نشان دادهایم که در اینجا میتوان به راحتی با ویلچر هوشمند آن را تغییر داد. پانتومیم به حرکات دست برای کنترل مریخ نورد 4wd پاسخ می دهد. حرکاتی که ما توانستیم با استفاده از نمونه اولیه نشان دهیم، به جلو، عقب، چپ، راست هستند.
ویدیو

الهام بخش
از آنجایی که در زمینه مهندسی الکترونیک حضور داشتیم، می خواستیم امکانات مختلف کار با چندین سنسور و جزء را بررسی و آزمایش کنیم. ایده کنترل دستگاه های تلفن همراه با استفاده از حرکات ساده دست بسیار جذاب و مفید است. ما همچنین میخواستیم محصولی بسازیم که چندین مشکل را حل کند، کارها را آسانتر کند و به طور کلی ابزار مفیدی برای مردم باشد.
چکار میکند
پانتومیم یک واحد کنترل کننده حرکتی قابل تنظیم است که می تواند برای تعامل قابل اعتماد انسان و ماشین استفاده شود. برای هدف نمایشی، ما یک مورد استفاده از پانتومیم را در یک شاسی 4WD نشان دادهایم که در اینجا میتوان به راحتی با ویلچر هوشمند آن را تغییر داد. پانتومیم به حرکات دست برای کنترل مریخ نورد 4wd پاسخ می دهد. حرکاتی که ما توانستیم با استفاده از نمونه اولیه نشان دهیم، به جلو، عقب، چپ، راست هستند.
چگونه آن را ساختیم
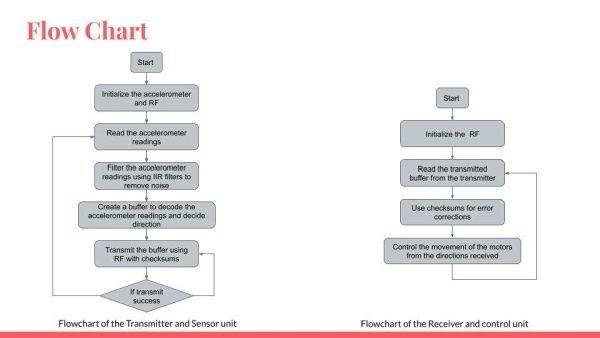
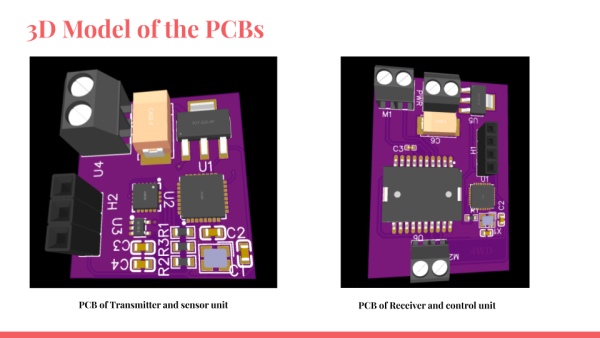
نمونه اولیه پروژه با استفاده از 4 موتور BO 300 RPM، 4 چرخ، یک درایور موتور L293d، یک ماژول RF (فرستنده و گیرنده) با فرکانس 433 مگاهرتز برای ارسال و دریافت دستورات حرکتی، و دو Arduino Uno (یکی برای گیرنده یعنی روشن) ساخته شده است. مریخ نورد و دیگری برای مدار فرستنده) برای اهداف ارتباطی و کنترلی. در کنار آن، برای تغذیه مریخ نورد، از 2 باتری 3.7 ولتی Li-On استفاده کردیم. شاسی با استفاده از تخته اکریلیک ساخته شده است. برخی از کدگذاری های اولیه آردوینو برای برقراری ارتباط بین فرستنده و گیرنده با چک سام ها انجام شد. برای شناسایی ژستهای پوشیدنی، فرستنده را با یک شتابسنج سه محوره وصل کردیم تا زاویه شیب را در هر جهت محاسبه کنیم. و در نهایت برای نشان دادن کاربرد گیرنده، آن را در یک مریخ نورد 4WD گنجانده ایم.
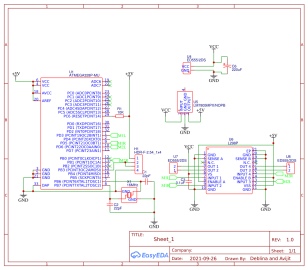
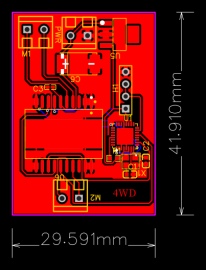
برای بخش نرم افزار ، ما از EasyEDA برای طراحی PCB ها و از Arduino IDE برای توسعه سیستم عامل استفاده کردیم.