


"Circuito" یک پد کنترل DIY است. این یک پروژه تکمیلی برای پروژه قبلی بازوی رباتیک من است . پد کنترل یک ساختار مکانیکی کنترل شده توسط کامپیوتر است که به حرکت و مدیریت هر بازوی رباتیکی وابسته به موتورهای سروو کمک می کند.
می توان آن را به تنهایی پد کنترل جنبشی در نظر گرفت، اما آنها همچنین می توانند هر دستگاه آردوینو دیگری را کنترل کنند.
مرحله 1: سناریو

Circuito مبتنی بر Arduino Due است.
استفاده از آن برای هر یک از بازوی رباتیک یا هر پروژه مبتنی بر موتورهای سروو، البته پس از برنامهنویسی وصلههای بصری به زبان برنامهنویسی آردوینو، آسان است.
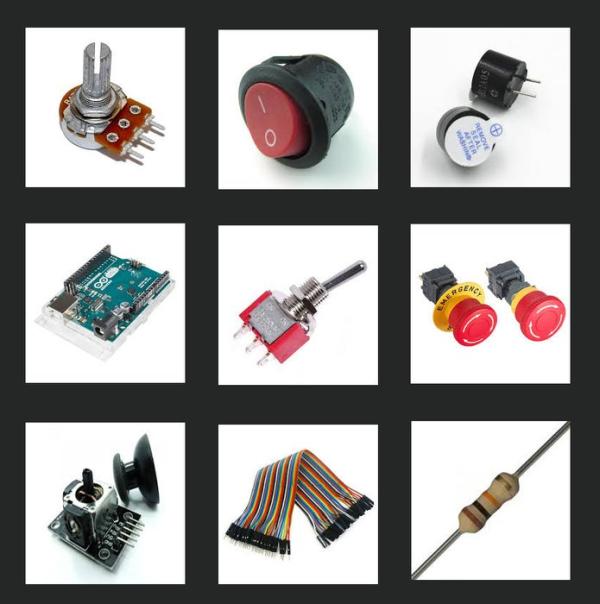
یک پتانسیومتر، یک جوی استیک و سه ورودی سوئیچ برای تغییر پارامترهای از پیش تعریف شده در دسترس هستند. همچنین می توان از کلید ضامن برای کنترل بیشتر نرم افزار یا برای روشن و خاموش کردن چراغ ها، کنترل دستی با استفاده از پتانسیومتر برای کنترل شتاب موتورهای سروو، واکنش پذیری صدا با استفاده از زنگ خروجی صدا برای تجسم کنترل و حرکات استفاده کرد. ماژول کاملاً با بردهای آردوینو سازگار است و عملکرد مستقل نیز امکان پذیر است. خروجی های مدار برخی از سفارشات پورت سریال آماده شده قبلی است که در مانیتور پورت سریال آردوینو قابل مشاهده است و به راحتی قابل تغییر است.
من تصمیم گرفتم پانل جلویی را به عنوان یک برد مدار چاپی واقعی طراحی کنم زیرا راه حلی بسیار مقرون به صرفه است و فرصت های طراحی جالبی را با استفاده از چاپگر رنگی جوهرافشان، تخته چوبی ام دی اف و لایه های ماسک لحیم فراهم می کند.
مرحله 2: طراحی

به نظر من بهترین راه برای ساختن یک محصول در مقیاس زندگی، ابتدا آن را تصور کنید، و من ابتدا کنترلر را در Google SketchUp طراحی کردم ، زیرا ابزار بسیار موثری برای ترسیم نوآوری شماست.
مرحله 3: ابزار و مواد
ابزار دست:
– آهن لحیم کاری
