


چگونه یک گیمبال درست کنیم
با نحوه ساخت یک گیمبال 2 محوره برای دوربین اکشن خود آشنا شوید
در فرهنگ امروزی همه ما عاشق ضبط ویدیو و ثبت لحظات هستیم، به خصوص زمانی که شما هم مانند من یک تولید کننده محتوا هستید، مطمئناً هر از گاهی با چنین ویدیوهای لرزان مواجه شده اید. بنابراین در این وبلاگ ما یک نسخه DIY از گیمبال موتوری خواهیم ساخت
مرحله 1: قطعات مورد نیاز برای گیمبال را جمع آوری کنید

مونتاژ گیمبال 2 محوره FPV BGC.
2 سلول یون لیتیوم
آردوینو نانو.
ماژول جوی استیک
کابل اتصال 3s JST.
PCB سفارشی
مرحله 2: اتصالات
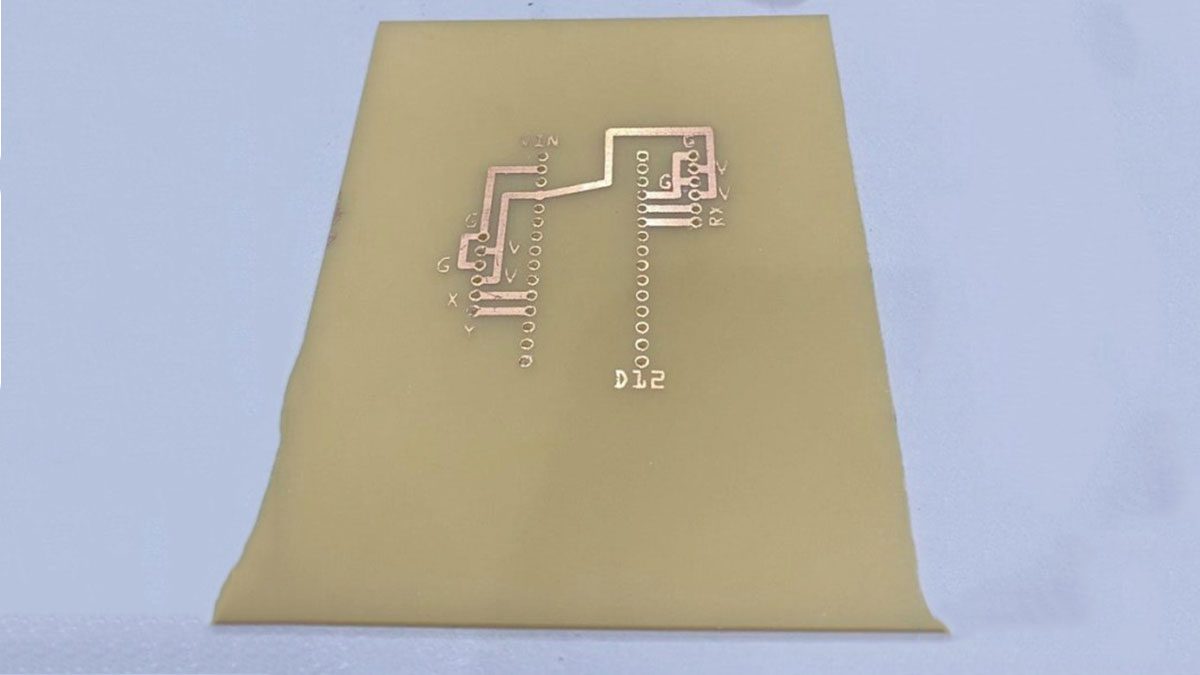
ما از یک مجموعه گیمبال 2 محوره BGC استفاده می کنیم که خارج از جعبه به عنوان گیمبال کاربردی است. اما دقیقاً شبیه گیمبال تجاری نیست زیرا ما به حرکات Pan Tilt نیاز داریم. ما به خدمات نیاز داریم برای خلاقیت بیشتر باید از کاربر نظر بگیریم. میتوانیم از پینهای RX- Roll و RX-Pitch برای دادن ورودیهای اضافی به مادر برد BGC استفاده کنیم، که با کمک سیگنال PWM / PPM انجام میشود. برای تولید سیگنال PWM/PPM، از Arduino Nano به عنوان کنترلر استفاده می کنیم و ورودی را از Joystick می گیریم، که اساساً سخت افزار رابط کنترل کننده برای گیمبال ما خواهد بود. اتصالات اساساً 2 پین سیگنال به آردوینو و 2 پین خروجی به RX Roll و RX Pitch هستند.
مرحله 3: کد را در آردوینو آپلود کنید
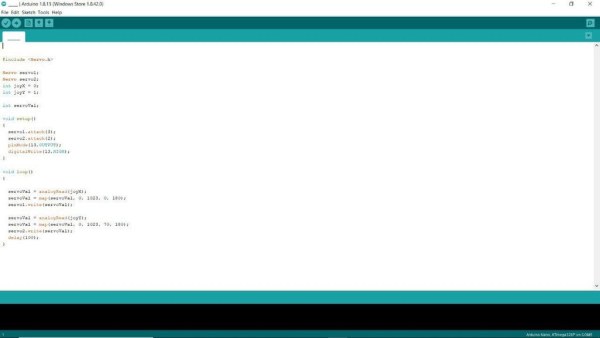
ابتدا Pinouts برای خروجی PWM را به صورت Servo 1 و Servo 2 تعریف می کنیم
سپس خروجیهای ورودی را برای سروو و جوی استیک تعریف میکنیم، خروجی خود را در متناظر با ورودی جوی استیک ترسیم میکنیم. میتوانید کد را در اینجا پیدا کنید! کد
مرحله 4: نرم افزار
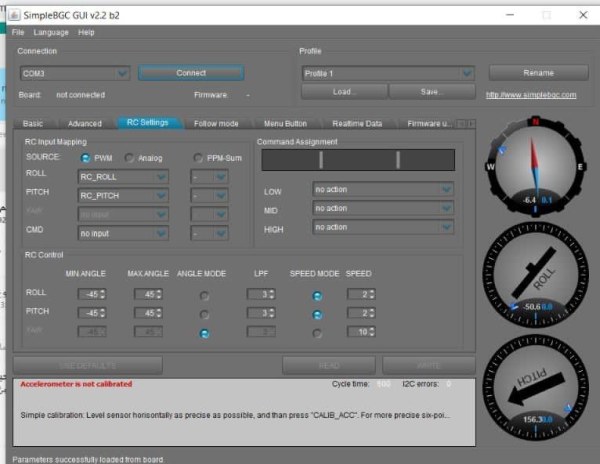
از آنجایی که ما از گیمبال 2 محور BGC استفاده می کنیم که همراه با مادربرد ارائه می شود و توسعه دهندگان در basecam کار فوق العاده ای در توسعه یک رابط نرم افزاری برای این سخت افزار انجام داده اند، می توانید نرم افزار را از این لینک دانلود کنید.
ما نیاز داریم که گیمبال بسیار نرم و روان باشد، زیرا یک گیمبال دستی است، بنابراین PID و قدرت موتور را در تب Basics نرم افزار خود تنظیم می کنیم.
