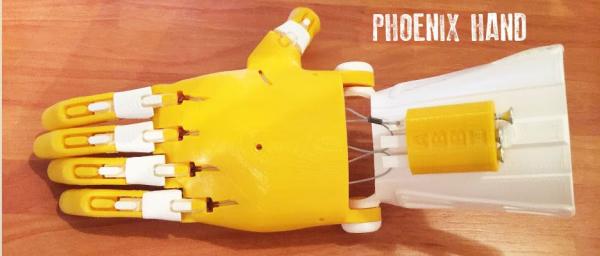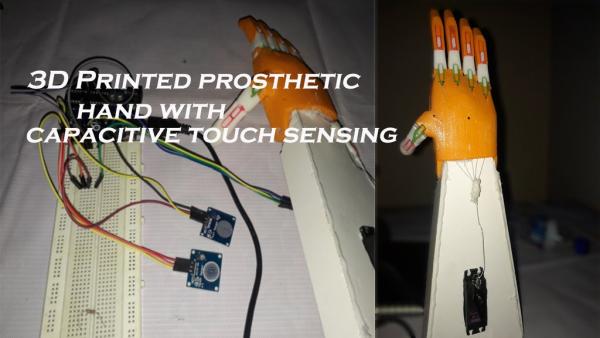
در این Instructables من با ایده ای آمده ام که می تواند در دست های مصنوعی پرینت سه بعدی موجود پیاده سازی شود. در پروتزهای برقی موجود، من نتوانستم از فناوری حسگر لمسی خازنی برای فعال کردن انگشتان استفاده کنم . این پروژه دو چیز بسیار جالب را ترکیب می کند، آردوینو با حسگر لمسی خازنی برای فعال سازی و ریمیکس طراحی دست e-NABLE Phoenix .
اساساً دست ققنوس یک دست با نیروی بدن است، کاری که من در این پروژه انجام دادهام این است که با انتخاب طرح قطعه مورد نیاز، آن را به یک پروتز الکتریکی تبدیل کردم.
مزیت حسگر لمسی خازنی این است که از طریق لمس می توانید انگشتان را به راحتی فعال کنید. در حال حاضر این مدل نمی تواند تک تک انگشتان را کنترل کند و توسعه بیشتری در ظرفیت تحمل وزن و ظرفیت گرفتن مورد نیاز است.
**توجه: این یک مدل نمونه اولیه است، به بهبودهای بیشتری نیاز است

مرحله 1: جمع آوری قطعات:
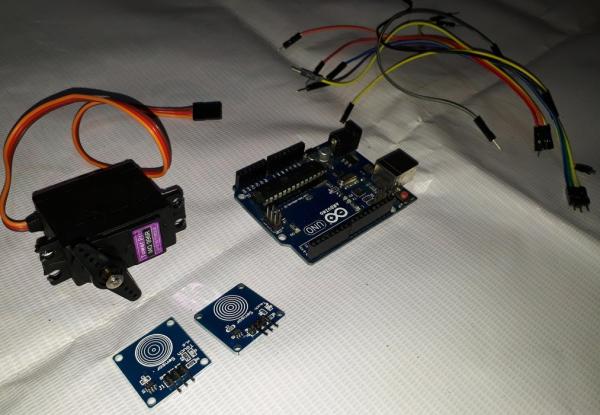
قطعات الکترونیکی:
- آردوینو اونو
- سنسور لمسی TTP223 2
- سروموتور MG996R
مونتاژ دست فونیکس:
جزئیات مونتاژ دست فونیکس در مراحل زیر ذکر شده است
من از فلکسور به عنوان نخ ماهیگیری و اکستنسور به عنوان نوار لاستیکی استفاده کرده ام
ابزار:
- پرینتر سه بعدی
- تفنگ چسب
مرحله 2: چاپ دست:
این پروژه از E-NABLE Phoenix که قبلا طراحی شده بود استفاده می کند .