

اگر تا به حال به قیمت های دست مصنوعی نگاه کرده باشید، ممکن است متوجه شده باشید که قیمت آنها می تواند بیش از 5000 دلار باشد، با بازوهای کنترل شده میوالکتریک پیشرفته تر با قیمت بیش از 20000 دلار. با توجه به اینکه بیش از 80 درصد افراد قطع عضو از کشورهای در حال توسعه هستند که دسترسی به اندام های مصنوعی به دلیل کمبود مراقبت های بهداشتی و منابع مالی محدود است، چنین قیمت هایی ایده آل نیستند.
با این حال، با پرینت سه بعدی، میتوانیم پروتزهای مقرونبهصرفهتری ایجاد کنیم که میتواند نیاز افراد قطع عضو را بهتر برطرف کند. برخی از مزایای اصلی پرینت سه بعدی، نمونه سازی سریع، سفارشی سازی اندازه، و انعطاف پذیری برای جایگزینی قطعات با چاپ قطعات جدید است. این پروژه یک بازوی رباتیک چاپ شده سه بعدی از یک پروژه منبع باز به نام InMoov را با یک حسگر عضلانی سازگار با آردوینو از Advancer Technologies ترکیب می کند. در حالی که این بازو ممکن است به اندازه یک اندام مصنوعی 20000 دلاری پیشرفته نباشد، اما هنوز یک اثبات مفهومی است که امکان ایجاد اندام های مقرون به صرفه را نشان می دهد که می توانند عملکرد قابل مقایسه ای را با کسری از قیمت ارائه دهند. همچنین فکر می کنم به طور کلی پروژه جالبی است و می تواند علاقه زیادی را برای کسانی که مایل به کار با پروتز هستند برانگیزد.
تدارکات

قطعات اصلی:
- دست چاپ سه بعدی از InMoov
- آردوینو نانو
- سنسور عضلانی MyoWare
- الکترودها
- سروو موتورها (من از سرووهای MG996R استفاده کردم)
- سیم ها
- باتری 7.2 ولت
- منطقه ماهیگیری
- پیچ
دیگر:
- دریل و کاغذ سنباده برای بزرگ کردن دهانه ها و ایجاد یک روکش صاف
- چسب پلاستیکی دو قسمتی برای چسباندن قطعات پرینت سه بعدی
- سیم کش
- پیچ گوشتی
- نوار الکتریکی
مرحله 1: چاپ و مونتاژ سه بعدی

همانطور که در مقدمه ذکر شد، دست پرینت سه بعدی مورد استفاده در این پروژه از یک پروژه منبع باز به نام InMoov می آید . برای این پروژه فقط از دست و ساعد استفاده خواهیم کرد. پیوند فایلهای STL را میتوانید در اینجا پیدا کنید و پیوند دستورالعملهای مونتاژ را در اینجا پیدا کنید .
از آنجایی که تعداد زیادی راهنما و منابع در مورد نحوه ساخت این بازو وجود دارد. من روند ساخت را در این راهنما پوشش نمی دهم. من تصاویری از برخی از مراحل در صورتی که می خواهید به آنها ارجاع دهید قرار داده ام. مهم است که در روند ساخت صبور باشید، زیرا ممکن است کمی مسیر و خطا طول بکشد تا همه قطعات جا بیفتند و به آرامی حرکت کنند. برای هر مرحله وقت بگذارید و از روند ساخت لذت ببرید. قول میدهم بعد از اتمام کار بسیار رضایتبخش خواهد بود.
مرحله 2: همه چیز را با هم سیم کشی کنید
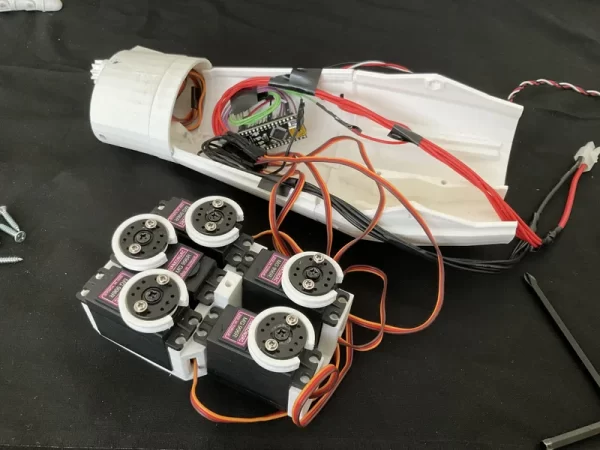
در حالی که ممکن است در ابتدا دلهره آور به نظر برسد. سیم کشی این مدار در واقع بسیار ساده است. در اصل ما می خواهیم هر یک از 5 سروو را به یک سیم برق، زمین و سیگنال وصل کنیم. در مجموع، شما باید 6 سیم برق و 6 سیم زمین از باتری خود داشته باشید. من یک تصویر قرار داده ام که این را بهتر نشان می دهد.
ممکن است بپرسید چرا وقتی فقط 5 سروو داریم به 6 سیم نیاز داریم. این به این دلیل است که برای تغذیه برد آردوینو باید یکی از سیم های برق و یکی از سیم های زمین را به پایه زمین آردوینو وصل کنیم. سیم های سیگنال باید مستقیماً به هر یک از پین های دیجیتال آردوینو متصل شوند. برای مدارم، سرووها را به پین های دیجیتال D3، D5، D6، D9 و D10 روی برد آردوینو نانو وصل کردم.
در مرحله بعد، ما می خواهیم حسگر عضلانی Myoware خود را به آردوینو متصل کنیم. برای این کار میخواهیم سرب مثبت سنسور Myoware را به خروجی 3.3 ولت برد آردوینو متصل کنیم. سپس میخواهیم حسگر Myoware را به سمت منفی برسانیم و آن را به پایه زمین در برد آردوینو وصل کنیم. در آخر، میخواهیم سیگنال سنسور Myoware را وصل کنیم و آن را به یکی از پایههای آنالوگ آردوینو وصل کنیم (من آن را به A3 وصل کردم). این به آردوینو اجازه میدهد سیگنالهای حسگر عضلانی را که برای کنترل سرووها استفاده میشود بخواند.
اگر در مدارها تازه کار هستید، این ممکن است طاقت فرسا به نظر برسد و اشکالی ندارد. همه اینها بخشی از فرآیند یادگیری است. درک تمام جزئیات ممکن است کمی طول بکشد. اما با حوصله و کنجکاوی از این تجربه بیرون می آیید و خیلی بیشتر از زمانی که شروع کرده اید می دانید.
