

مدتی است که می خواهم ربات خودم را بسازم. اما پس از تلاش های فراوان و ناموفق، امیدم را از دست دادم که ممکن است این اتفاق بیفتد. من متوجه شدم که هیچ رباتی کوچک، قوی و فوق العاده آسان برای افزودن به آن وجود ندارد که در حد بودجه من باشد. بعد از ساعتها تحقیق و بسیاری از کیتهای ربات، تصمیم گرفتم یکی از آنها را از ابتدا بسازم. این شامل ساخت پایه و وسایل الکترونیکی توسط خودم می شود. من همیشه از طرفداران آردوینو و الکترونیک منبع باز بودم. به راحتی به دست آوردن شماتیک و اجزای ارزان تر باعث شد این پروژه محقق شود.
این دستورالعمل بیشتر یک راهنما است و نه گام به گام، اما همچنان مراحل ساخت یک ربات قابل استک را نشان می دهد که برای بسیاری از پروژه های آینده دوام خواهد آورد.
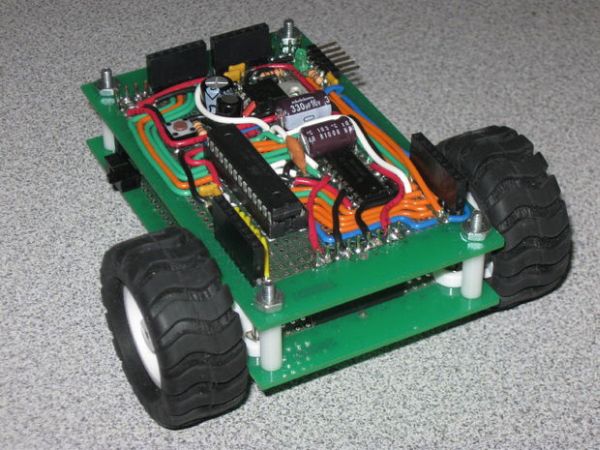
من تصمیم گرفتم که شیلدها (تابلوها) را روی هم قرار دهم (دقیقاً مانند آردوینو واقعی) زیرا گسترش و تغییر موارد در صورت لزوم بسیار آسان است. دلایل دیگر این است که هزینه ساخت خود در مقایسه با سایر کیت ها یا کیت های پیش ساخته موجود در بازار بسیار کم است.
این طراحی همچنین می تواند به راحتی در Swarm of Robots ادغام شود (من قصد دارم این کار را در یک به روز رسانی آینده انجام دهم) به دلیل گسترش و هزینه کم.
در نهایت، آماده باشید تا در طول برنامه ریزی و ساخت ربات خود، بازنگری های زیادی را انجام دهید.
اگر در مورد ساخت خود سوالی دارید، برای من نظر یا پیام بگذارید تا تمام تلاشم را بکنم تا به آنها پاسخ دهم.
مرحله 1: قطعات مورد نیاز
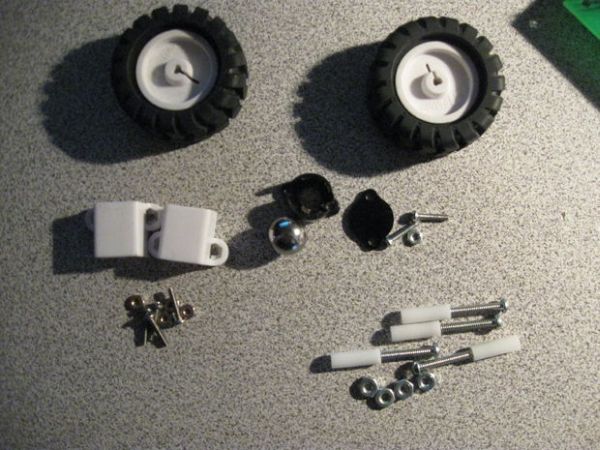
برخی از قطعات مورد نیاز عبارتند از: (لینک به مواردی است که من استفاده کردم).
2x تخته پروتو گیربکس میکرو 2x Jameco . براکت های توسعه یافته Pololu 2x. چرخ پولولو 2×40×19 میلی متر. توپولو 1 x 3/8 اینچی. نگهدارنده باتری Pololu 1x AAA. Digi-key 7x 0.1uf خازن. هدرهای انباشته دستگاه مدرن . سربرگ های دو ارتفاع دستگاه مدرن . دستگاه مدرن (دیگر در دسترس نیست). سربرگ های مرد. هدرهای زن دستگاه مدرن . دستگاه مدرن رگولاتور 1x LDO 5 ولت. دستگاه مدرن 2 خازن 330uf. خازن سولاربوتیک 1x 47uf و 220uf. (توضیحات زیر را بررسی کنید). سوکت 1 x 28 پین DIP. دستگاه مدرن رزوناتور 1×16 مگاهرتز. دستگاه مدرن 1x Atmega328 با بوت لودر. درایور موتور مدرن دستگاه 1x SN754410. Digikey 1x LED. 1 عدد سوئیچ لمسی. مقاومت های مختلف 1k,10k. دستگاه مدرن 4x Standoffs. (من را از نوارهای VHS قدیمی برداشتم) سیم اتصال 22 گیج مختلف. (فروشگاه سیم/الکترونیک محلی) انواع سخت افزار 4-40 و 2-56. دیودهای مختلف پولولو . (1N4001 توصیه می شود) Digikey
یک وبسایت خوب برای بررسی Robotshop.com (بینالمللی) یا Robotshop.ca (کانادا) است
. در اینجا من در واقع موارد زیر را خریدم: موتورهای دنده، براکتهای موتور، توپگیر، چرخها، سربرگهای قابل انباشته، سیم اتصال، برخی ابزارها و چیزهای مختلف دیگر. برای ساختن روبات هایم
برخی از خازنهایی که من استفاده کردم از یک درایو CD/DVD کامپیوتر قدیمی نجات یافتهاند (برای چنین چیزی بسیار خوب کار میکنند، زیرا معمولاً ولتاژ 16 ولت دارند، معمولاً حدود 220uf و مشخصات بسیار پایینی دارند).
من خرید بسته کابل BBB BUB دستگاه مدرن را توصیه می کنم . زیرا شامل برنامه نویس FTDI، کابل USB، برد Bare Bones (این کیت برد شامل Atmega 328، سوکت 28 پین، رزوناتور، تعدادی هدر، برخی از خازن ها، برخی از مقاومت ها، هدر زاویه راست، سوئیچ لمسی و LED است. ). ارزان تر از خرید همه چیز جدا.
مرحله 2: ابزارهای مورد نیاز
در واقع فقط ابزارهای اولیه مورد نیاز است مانند:
دستگاه لحیم کاری پایه دار سیم
لحیم کاری دستگاه مته برند Dremel. پیچ گوشتی برش های کناری فلاش و غیره.
مرحله 3: برنامه ریزی
استفاده از نرم افزار PCB به این مرحله کمک می کند. من از Express PCB برای کمک به برنامه ریزی جایی که برخی از قطعات باید بروند استفاده کردم.
اما مهم نیست که چقدر برنامه ریزی کرده اید، آماده باشید که در طول مسیر تغییراتی ایجاد کنید.
