

قطعات الکتریکی
اجزای الکتریکی پنج موتور و مدارهای مرتبط با آنها، دکمه ها و ترموکوپل هستند.
مدار
ما دو استپر موتور، سه سروو، یک ترموکوپل و مجموعهای از دکمهها را با استفاده از آردوینو کنترل میکنیم. نمودار مدار نهایی ما به صورت زیر است:
ساخت مدار
1. استپر موتورها: اولین مرحله ای که در ساخت مدار با آن برخورد کردیم، مدار پله ای (برای بالابر و اکسترودر) بود. ما پلهها را به موتورهای سروو یا DC انتخاب کردیم زیرا به گشتاور زیادی نیاز داشتیم که سرووهای سازگار را بسیار گرانتر میکرد و به بازخورد نیاز داشتیم که موتورهای DC را رد میکرد. ما تصمیم گرفتیم درایورهای پله ای خود را با استفاده از H-bridge (L293D) بسازیم، زیرا نگران محدودیت های بودجه بودیم و درایورهای پله ای بسیار گران هستند. ما توانستیم درایورهای خود را بسازیم زیرا استپرهای ما جریان نسبتاً کمی را میکشند و میتوانیم به کتابخانه پلهای آردوینو دسترسی داشته باشیم تا مؤلفه نرمافزار را آسانتر کنیم. اشکال این بود که ما به چهار پین آردوینو برای درایو هر استپر نیاز داشتیم. ما سعی کردیم از یک مدار متفاوت استفاده کنیم (شکل 2) که فقط به دو پایه آردوینو برای هر موتور نیاز دارد، اما استپرها به نرمی چرخش نداشتند، که برای اکسترودر مهم بود.
2. سروو موتورها: ما سپس روی برق رسانی به سرووها کار کردیم. شکل 3 نحوه سیم کشی هر سروو را نشان می دهد. این اولین باری بود که ما با مشکلات برق مواجه شدیم زیرا سرووها جریان زیادی میکشیدند که نمیتوان آن را توسط پین 5 ولت آردوینو تامین کرد. ما این مشکل را به طور موقت با جدا کردن هر سروو در نرم افزار بلافاصله پس از پایان چرخش آن حل کردیم تا از چرخش بیش از یک سروو در یک زمان جلوگیری کنیم. ما سعی کردیم منبع تغذیه 12 ولت خود را به 5 ولت تنظیم کنیم، اما با همان مشکلات فعلی مواجه شدیم (رگولاتوری که ما به آن دسترسی داشتیم، جریان محدود به 150 میلی آمپر بود). به دلیل محدودیتهای زمانی/مادی، تصمیم گرفتیم سرووها را با استفاده از چهار باتری AA تغذیه کنیم.
ما انتخاب کردیم که سرووهای دائماً در حال چرخش داشته باشیم زیرا دو تا از سیستمهای ما (شکر و همزن) باید 360 درجه بچرخند. ما نمی خواستیم سروو را هک کنیم زیرا تجربه ای در این زمینه نداشتیم و سرووهای مداوم نسبتاً ارزان بودند. ما در نهایت فقط سه سروو پیوسته (یکی برای مبدل نوک) خریدیم، حتی اگر مبدل نوک از کنترل موقعیت به جای کنترل سرعت سود می برد. ما موفق شدیم سروو را کالیبره کنیم و یک هک نرم افزاری برای انجام چرخش های 180 و 360 درجه با چرخاندن سروو برای مدت زمان مشخصی پیاده سازی کنیم.

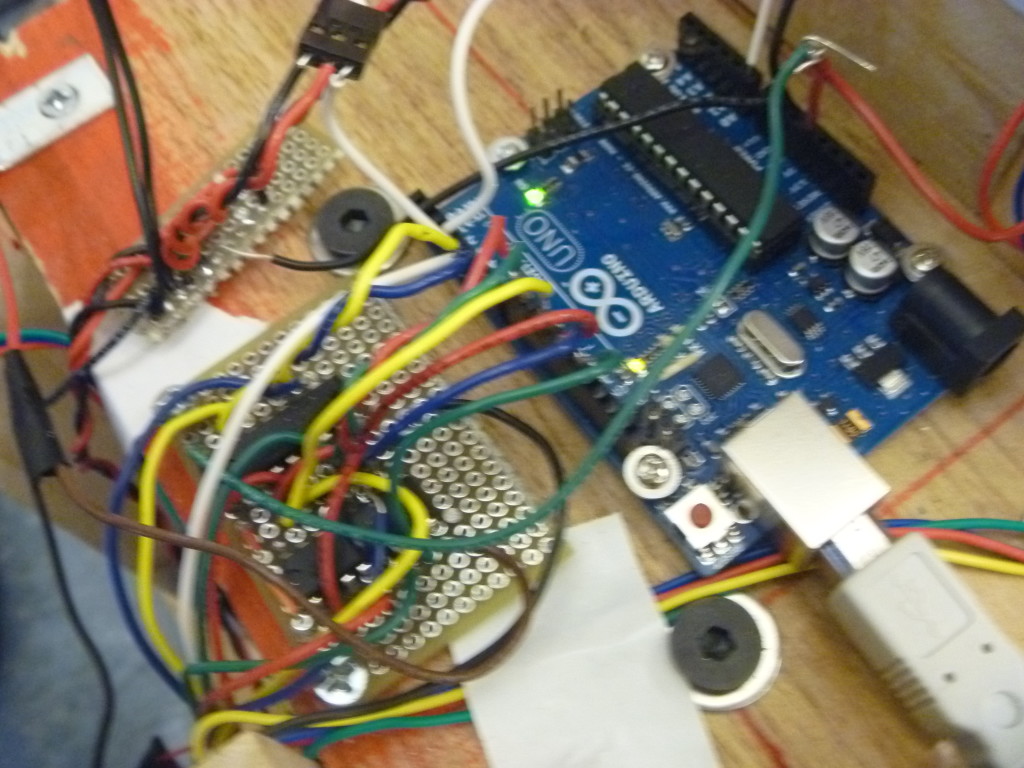
3. ترکیب: بزرگترین مشکلی که در هنگام ترکیب مدارهای استپر و سروو داشتیم در جریان کشیده شده بود. ما به سوزاندن آردوینوها ادامه دادیم زیرا پنج موتور ما به قدرت زیادی نیاز داشتند. ما در نهایت این مشکل را (در بیشتر موارد) با تغذیه تمام موتورها از خارج، از طریق باتری یا یک آداپتور دیواری 12 ولت برطرف کردیم. ابتدا مدارها را روی یک تخته نان با هم ترکیب کردیم تا بتوانیم موتورها را به طور کامل آزمایش کنیم و در صورت نیاز اصلاح کنیم.
پس از اینکه ما راضی شدیم که همه موتورها هنگام اتصال به سیستمهای مربوطه خود کار میکنند (که در بخش مکانیک با جزئیات بیشتر بحث شد)، مدار را به شکل دائمیتری منتقل کردیم - روی یک پروتوبرد. همچنین نصب پروتو برد بر روی سیستم واقعی آسان تر از برد برد است.
برای جزئیات بیشتر: Chur-Robot
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Electrical Components
The electrical components are the five motors and their associated circuits, the buttons, and the thermocouple.
