



این پروژه مدرسه من برای سال پنجم دبیرستان است (من ایتالیایی هستم، ما 5 سال دبیرستان داریم).
این شامل یک دست مصنوعی است که توسط یک دستکش با سنسورهای انعطاف پذیر کنترل می شود. دست مصنوعی حرکات دست را با دستکش کنترلی به صورت بی سیم بازتولید می کند. دست و دستکش هر دو با آردوینو کار می کنند.
من فقط می خواستم کارم را برای همه علاقه مندان به اشتراک بگذارم
این راهنما هنوز در حال توسعه است، با عرض پوزش اگر برخی از قسمت ها واضح نیستند، در آینده تعدادی تصویر سه بعدی قرار خواهم داد.
من چیزی در مورد پروژه خود در صفحه فیس بوک خود به اشتراک می گذارم: https://www.facebook.com/Gabry295
مرحله 1: مواد مورد نیاز
من تقریباً همه چیز را از https://www.sparkfun.com/ خریدم، قیمت های مناسبی دارند (منظورم تبلیغ نیست!)
هزینه کل: حدود 160 دلار
مواد برای دستکش کنترل:
• یک دستکش کشسان .
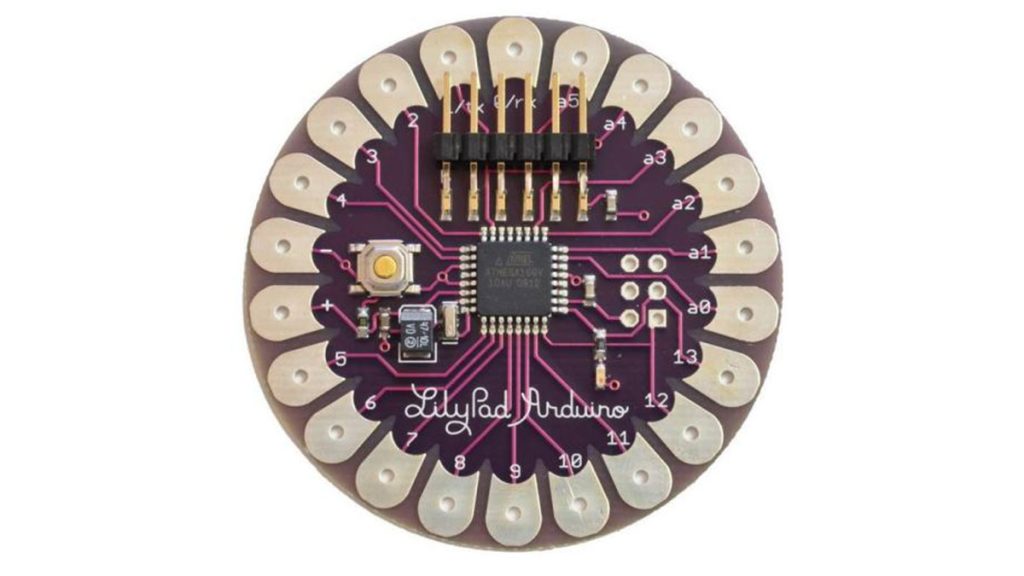
• برد آردوینو LilyPad (نسخه های مختلفی وجود دارد که معمولاً فقط 4 ورودی آنالوگ دارند، پس توجه کنید و همانی را که در تصویر است خریداری کنید): دقیقاً مانند آردوینو UNO کلاسیک کار می کند، بنابراین می توانید حتی از آردوینو نانو استفاده کنید، اما هزینه کنید. توجه به ولتاژ مورد نیاز؛
• ماژول XBee : برای ارتباط رادیویی.
• سپر برای اتصال ماژول Xbee .
• 5 سنسور فلکس ;
• 5 مقاومت: 47 KΩ ;
• بسته باتری با باتری های 3×1.5 ولت (Lilypad می تواند از 2.7 تا 5.5 ولت تغذیه شود، بنابراین 4.5 V مشکلی ندارد).
• آداپتور LilyPad FTDI : برای اتصال برد LilyPad به رایانه و بارگیری برنامه ها با Arduino IDE (کاملا اختیاری است، زیرا می توانید از برد Arduino UNO برای حذف تراشه ATmega نیز استفاده کنید، اما ایجاد این نوع اتصال هر بار دشوار است) .
-
