


سلام بچه ها. در این آموزش به شما یاد می دهم که چگونه یک ربات جلوگیر از موانع بسازید. این ربات یک ماشین 2 چرخ کوچک و ساده خواهد بود که تا زمانی که مانعی در مسیر خود تشخیص دهد به جلو حرکت می کند. پس از انجام این کار، می ایستد، کمی به عقب حرکت می کند و سپس به سمت چپ و راست خود نگاه می کند.
سپس فواصل موجود در پیش رو در هر دو طرف را مقایسه می کند و سپس به سمتی می چرخد که فاصله موجود نسبتاً بیشتر به نظر می رسد. به این ترتیب قادر خواهد بود در محیطی پر از موانع بدون برخورد با هیچ مانعی حرکت کند. این یک نمایش کوچک از مفهوم اجتناب از برخورد است که در برنامه های مختلف مانند ربات های انبار، ماشین های بدون راننده و غیره استفاده می شود.
برای تشخیص فاصله، ربات از حسگر اولتراسونیک HC-SR04 استفاده می کند. بنابراین این سنسور امواج صوتی اولتراسونیک را هر 10 میکروثانیه ارسال می کند و اگر مانعی در پیش باشد، سنسور اکو را دریافت می کند. بر اساس زمان سفر، فاصله بین سنسور و جسم را می داند. پس بیایید شروع کنیم!
مرحله 1: کامپوننت ها را جمع آوری کنید
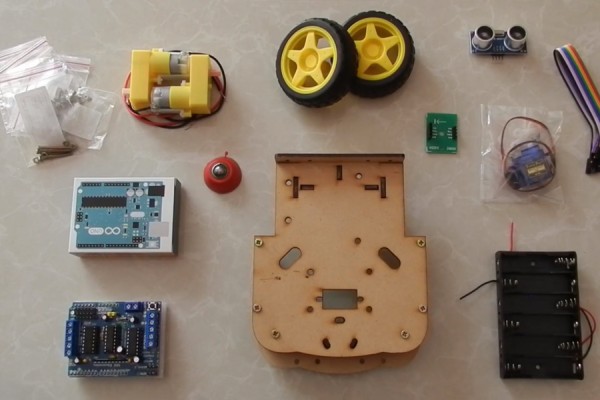
ابتدا، برای شروع، بدیهی است که باید اجزا و ابزارهای مورد نیاز برای ساخت ربات را جمع آوری کنیم. اجزا و ابزارهای مورد نیاز را در زیر بیابید:
قطعات را برای سهولت در یک مکان دریافت کنید: کیت رباتیک آردوینو
اجزای فردی:
- آردوینو UNO
- محافظ موتور L293D
- شاسی (شامل موتور و چرخ)
- سیم ها
- نگهدارنده باتری
- میکرو سرو موتور SG90
- سنسور اولتراسونیک HC-SR04
- پایه سنسور (اختیاری)
ابزارها (اختیاری):
اجزاء را جمع کنید و به مرحله بعدی بروید!
مرحله 2: موتورها و چرخ ها را وصل کنید
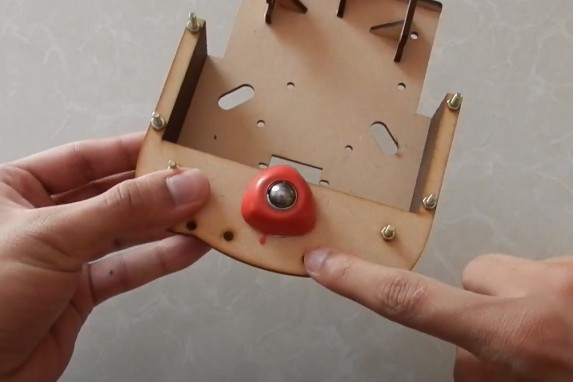
اولین کاری که من با شاسی انجام دادم اضافه کردن یک چرخ کاستور در جلو بود که به عنوان چرخ سوم پشتیبانی در جلو عمل می کند و می تواند آزادانه بچرخد زیرا دارای آزادی 360 درجه است. به این ترتیب می توانیم از استفاده از 4 چرخ جلوگیری کنیم و با یک ربات 2 چرخ فرار کنیم.
کاری که ما باید انجام دهیم یک مرحله کلاسیک در هر پروژه مرتبط با خودرو است. موتورها و چرخ ها را به شاسی وصل کنید . هیچ راه خاصی برای انجام این کار وجود ندارد زیرا ممکن است همه از شاسی متفاوتی استفاده کنند، اما من می خواهم به یک نکته در اینجا اشاره کنم: اطمینان حاصل کنید که موتورها به طور محکم ثابت شده اند و هر دو یکسان هستند و همچنین چرخ ها دقیقاً به سمت جلو هستند. در غیر این صورت، ممکن است بعداً با مشکلی مرتبط با حرکت روبرو شوید.
