

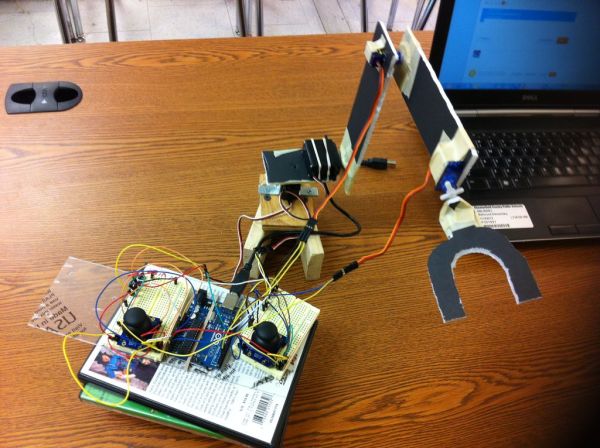
در این آموزش من به شما نشان خواهم داد که چگونه یک بازوی رباتیک ساده با 4 سروو، 2 جوی استیک آنالوگ و یک آردوینو UNO کنترل می شود. این بسیار شبیه به دستور من "2 Servos + Thumbstick" است. این آموزش به ویژه برای کمک به یکی دیگر از کاربران آردوینو است. "RobotZee".
من شما را قدم به قدم با استفاده از قطعات ساده ساختمانی راهنمایی می کنم. به یاد داشته باشید که این آموزش به شما کمک می کند تا با استفاده از این یکی به عنوان مثال، ایده ای در مورد چگونگی ساخت بازوی رباتیک خود داشته باشید. و مانند Arduinos Instructable دیگر من، تمام قطعات الکترونیکی به جز سرورهای میکرو، @ RADIOSHACK خریداری شدند. آنها در Ebay خریداری شدند.
توجه: ساخت این بازوی رباتیک فقط برای نمونه است. من برای این پروژه از مواد ساده و ارزان استفاده کرده ام.
و این آموزش برای کمک به سایر کاربران آردوینو در پروژه های شخصی آنها است. هیچ انتقادی شخصی نخواهد بود و نه به دلیل ساخت و ساز و مواد استفاده شده برای بازوی رباتیک. به عبارت دیگر از این آموزش برای ساخت بازوی رباتیک خود و بهتر استفاده کنید. با تشکر از همه شما…BI()ME(H75
مرحله 1: مواد و نرم افزار
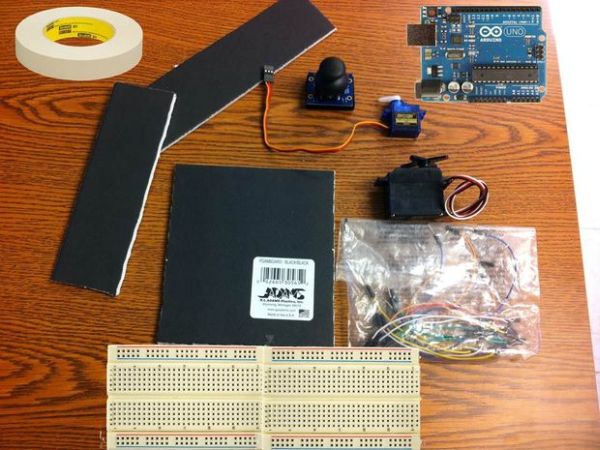
در اینجا لیست بدون ترتیب خاصی از قطعات، ابزارها و نرم افزارهای مورد نیاز برای این پروژه آمده است.
قطعات:
1. آردوینو UNO REV3
2. (2) تخته نان
3. (2) سرووهای Parallax
4. (2) سرووهای میکرو Ebay
5. (2) جوی استیک های آنالوگ Parallax
6. کابل های بلوز تخته نان
7. نوار پوششی
8. برد فوم
9. چاقوی کاربردی، قیچی.
10. صبر (بسیار زیاد)
نرم افزار:
نرم افزار آردوینو 0023
توجه: من ترجیح می دهم از این نسخه استفاده کنم زیرا نسخه جدیدتر باعث سردرد و مشکلات زیادی می شود.
مرحله 2: برش و مونتاژ قسمت 1
در این مرحله چیز زیادی برای توضیح وجود ندارد. فقط تخته فوم را هر طور که می خواهید برش دهید: 6.5 x 1.5 اینچ و دیگری 4.5 x 1.5 اینچ است. تنها کاری که باید انجام دهید این است که برش دهید و سوراخ هایی را به تناسب سرووها ایجاد کنید. به یاد داشته باشید که هدف اصلی این آموزش حرکت دادن سرووها با جوی استیک است.
توجه: قبل از برش و کنار هم قرار دادن همه چیز، باید حرکت سرووها را تست کنید و آنها را در جای مناسب، برای بازوی رباتیک و حرکات آن بچینید. (پس از تکمیل مراحل 5-8)
مرحله 3: برش و مونتاژ قسمت 2
من از نوار مدرسه برای نگه داشتن همه چیز در موقعیت خود استفاده کرده ام. پایه با تکه های چوب بازیافتی که در اطراف گاراژ پیدا کرده ام ساخته شده است. توجه کنید که سروو جلویی برای چرخش پنجه چگونه قرار می گیرد.
مرحله 4: برش و مونتاژ قسمت 3
در اینجا چیز زیادی برای توضیح نیست، فقط همه چیز را کنار هم قرار دهید. و برای درک شما به هر کانکشن و سروو با شماره ای اشاره می کنم.
EX: پایه سرو 1 (چرخش بدنه)
سرو 2 بازو_1 (بالا/پایین)
سرو 3 بازو_2 (بالا/پایین)
پنجه سرو 4 (چرخش پنجه)
توجه: اتصالات بسیار گیج کننده هستند و واضح نیستند، اما در مراحل بعدی آنها را توضیح خواهم داد.
