

آیا تا به حال به این فکر کرده اید که چگونه پرندگان مهاجر با وجود اینکه عموماً نادان هستند، می توانند چنین حس جهت گیری شگفت انگیزی داشته باشند؟ آنها می توانند میدان مغناطیسی زمین را با چیزی که اساساً یک قطب نما در بدن آنها تعبیه شده است، حس کنند. آیا این جالب نیست که احساس کنید این چگونه است؟

دستورالعملهای زیر بر اساس یک مقاله تحقیقاتی توسط مؤسسه فناوری OFFIS (آلمان)، یا Oldenburger Forschungs und Entwicklungsinstitut für Informatik-Werkzeuge und Systeme است، اگر شما را در آلمان به کار ببرید. آن را می توان اینجا پیدا کرد:
http://pielot.org/wp-content/uploads/2011/05/Pielot2011-TactileCompass.pdf
با تشکر بیشتر به چند راهنما در مورد نحوه ساخت مدارهای موتور ارتعاشی ساده و قطب نما دیجیتال مراجعه کنید. اگر توضیحات من این کار را برای شما انجام نمیدهد، احتمالاً اینها برای جنبههای مربوط به پروژه هستند:
http://learningaboutelectronics.com/Articles/Vibration-motor-circuit.php
http://www.funnyrobotics.com/2011/03/arduino-with-hmc6352-digital-compass.html
مرحله 1: مواد
بنابراین با وجود نقل قولهایی که در راه نیست، بیایید شروع کنیم. ابتدا به یک سری مواد نیاز دارید. بسیاری از این موارد به راحتی از Sparkfun در دسترس هستند، اما در بسیاری موارد ارزان تر از Jameco یا Digikey یا موارد دیگر. هزینه کل حدود 150 دلار است که بیشتر به دلیل آردوینو یا مشابه، تراشه قطب نما، موتورها و تسمه مناسب است. برای این پروژه شما نیاز دارید: 1x: برد ریزپردازنده آردوینو یا خانگی ATMega. من یک آردوینو را توصیه می کنم زیرا قرار دادن تنظیم کننده های ولتاژ، تشدید کننده و غیره به تنهایی در یک بسته کوچک دشوار است. شما به یک رابط سریال نیز نیاز دارید، اگرچه یک کابل USB برای آردوینو به خوبی کار می کند. من از Arduino Uno با ATMega 328p استفاده کردم. (~30 دلار) 1x: تراشه قطب نما Honeywell HMC6352. (~ 35 دلار) 1x: کمربند. ترجیحاً بوم یا پارچه، از انواع قایقرانی. چرم واقعاً برای این کار خوب نیست، و سگک های حلقه مانند سگک سنتی با سنجاق و سوراخ مانعی برای عناصر مدار نمی کنند. (20 دلار) 8x: موتورهای ارتعاشی. من از sparkfun #8449 استفاده کردم، آنها به خوبی @~3V (~5$ ea.) عمل می کنند. 8x: دیود 1N4001 (ارزان) 8x: خازن 0.1uF (ارزان) 8x: ترانزیستور 2N2222 (هر NPN احتمالاً کار خواهد کرد.) (ارزان) 8x: مقاومت های 1K (1/4 وات خوب خواهد بود، ریزپردازنده ها جریان کمی دارند.) (ارزان) 8x: مقاومت های 33-75 اهمی (حداقل 33، من از 47 استفاده کردم زیرا آنها را در اطراف قرار داده بودم.) (ارزان) برخی از: باتری / گیره 9 ولت چند مورد: سوزن و نخ (برای دوخت عناصر مدار روی تسمه پس از لحیم کاری مناسب.) تعداد زیادی: سیم ~22ga، نوار الکتریکی، لحیم کاری.
اختیاری اما توصیه میشود: یک مورد/محفظه برای مجموعه آردوینو یا ریزپردازنده شما.
اختیاری: یک سوئیچ روشن/خاموش برای اینکه مجبور نباشید باتری را از برق بکشید تا آن را خاموش کنید.
توجه داشته باشید که در حالی که من از 8 موتور استفاده کردم، می توانید از هر تعداد که دوست دارید استفاده کنید. فقط در این دستورالعمل ها عدد 8 را جایگزین کنید و در کد نهایی به جای افزایش 45 درجه از 360 / X استفاده کنید.
مرحله 2: ساخت مونتاژ موتور
قبل از شروع کار با کمربند واقعی، احتمالاً می خواهید یک نمونه اولیه با استفاده از تخته نان بسازید. مجموعه های موتور بسیار ساده هستند، اما شما به 8 عدد از آنها نیاز دارید. هر مجموعه به یکی از پینهای IO دیجیتال ریزپردازنده شما، بهعلاوه یک VCC و زمین مشترک 5 ولت متصل میشود. شما مجامع را به صورت موازی می خواهید.
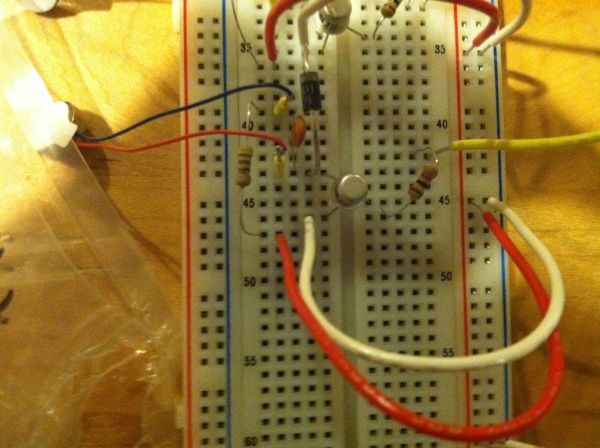
برای یک مونتاژ، tl;dr به تصویر مراجعه کنید. به طور طولانی تر، به سادگی پین دیجیتال مورد نظر خود را به یک مقاومت 1K وصل کنید و آن را به پایه B ترانزیستور انتخابی خود وصل کنید. پین E به زمین می رود و پین C کمی پیچیده تر است. شما می خواهید آن را به سه عنصر مدار متصل به صورت موازی متصل کنید. یک دیود، یک خازن 0.1uF و یک موتور. موتور پلاریته ندارد و خازن آن به اندازه ای کوچک است که نگران آن نباشید. اطمینان حاصل کنید که کاتد دیود (سمت با نوار) به سمت پین C ترانزیستور است. این مهم است، زیرا دیود برای جلوگیری از کشیدن جریان بیش از حد موتور و سرخ کردن ریزپردازنده وجود دارد. اگر ریزپردازنده خود را سرخ کنید، چیز مهمی نیست. برای یک تابلوی کاملاً جدید بهار نباشید، فقط یک ATMega 168/328 دیگر با 5 یا 6 دلار دریافت کنید و آن را وارد کنید. sparkfun مواردی را به فروش می رساند که دارای optiboot از قبل بارگذاری شده اند، بنابراین شما حتی به یک برد رابط سریال واقعی نیاز نخواهید داشت. در نهایت، مقاومت کوچک اهمی (33-75ish) خود را به کاتد دیود (و موتور/خازن پسوند) وصل کنید و آن را تا 5 ولت خارج کنید. برای جزئیات به تصویر مراجعه کنید. برای تعیین اینکه کدام پین کدام است، به برگه داده ترانزیستور انتخابی خود مراجعه کنید.
خودشه! یک تست ساده انجام دهید تا مطمئن شوید که همه چیز به درستی وصل شده است. توجه داشته باشید که موتورهایی که من توصیه میکنم دارای سرنخهای کوچکی هستند، بنابراین اگر میخواهید آنها را به یک تخته نان وصل کنید، واقعاً میخواهید یک لغزش کوتاه از سیم 22ga را به هر یک لحیم کنید تا اطمینان حاصل کنید که آنها تماس ثابتی دارند.
کد تست موتور (برای آردوینو یا برد ریزپردازنده با آردوینو optiboot):
const int motorPin = <پین شما #>;
void setup()
{
pinMode(motorPin, OUTPUT);
}
void loop()
{
// برای 2 ثانیه روشن و سپس 1 ثانیه خاموش کنید.
digitalWrite (motorPin، HIGH);
تاخیر (2000);
digitalWrite (motorPin، LOW)؛
تاخیر (1000);
}
مرحله 3: مجموعه های موتور بیشتری بسازید
این مرحله در نوشتن بسیار کوتاه است، اما کمی زمان و حوصله می خواهد. اکنون باید 7 مجموعه موتور دیگر بسازید و همه آنها را در مجموع 8 پین IO دیجیتال وصل کنید. سیم های ولتاژ و زمین شما باید بین مجموعه ها مشترک باشد. اگر تخته نان دارید فقط از ستون های +/- استفاده کنید تا کار را برای خود آسان تر کنید. وقتی کارتان تمام شد، باید چیزی شبیه به تصویر باشد، به جز با 8 موتور به جای 4. من از دو تخته نان با 4 تا روی هر کدام استفاده کردم. من فقط از یکی عکس گرفتم، ببخشید. هر سیم زرد باید به پین دیجیتال خود در آردوینو برود، قرمز/سفید به 5V/Ground.
من مطمئن هستم که اگر آن را درست وصل کرده باشید، می توانید از استفاده از تنها یک دیود/خازن خلاص شوید، اما این کار سیم کشی را آسان تر می کند و به هر حال آنها واقعاً ارزان هستند. فراموش نکنید که همه موتورها را تست کنید. از آنجایی که آنها به صورت موازی هستند، یک شکست باعث نمی شود که کل کار متوقف شود، که عیب یابی را بسیار آسان می کند. همه آنها را وصل کنید و فقط 7 پین دیگر به کد نمونه مرحله قبل اضافه کنید. برای هر یک باید آن را تعریف کنید، حالت را روی خروجی تنظیم کنید و به آن بگویید روشن یا خاموش شود:
// من از پین های 2-9 استفاده کردم، ممکن است شما پین های مختلفی داشته باشید.
const int motorPin = 2;
const int motorPin2 = 3;
const int motorPin3 = 4;
const int motorPin4 = 5;
const int motorPin5 = 6;
const int motorPin6 = 7;
const int motorPin7 = 8;
const int motorPin8 = 9;
void setup()
{
pinMode(motorPin, OUTPUT);
pinMode (motorPin2، OUTPUT)؛
pinMode (motorPin3، OUTPUT)؛
pinMode (motorPin4، OUTPUT)؛
pinMode (motorPin5، OUTPUT)؛
pinMode (motorPin6، OUTPUT)؛
pinMode (motorPin7، OUTPUT)؛
pinMode (motorPin8، OUTPUT)؛
}
void loop()
{
// هر پین را به مدت 2 ثانیه روشن و سپس 1 را خاموش کنید
. digitalWrite(motorPin, HIGH);
digitalWrite (motorPin2، HIGH);
digitalWrite (motorPin3، HIGH);
digitalWrite (motorPin4، HIGH);
digitalWrite (motorPin5، HIGH)؛
digitalWrite (motorPin6، HIGH);
digitalWrite (motorPin7، HIGH)؛
digitalWrite (motorPin8، HIGH);
تاخیر (2000);
digitalWrite (motorPin، LOW)؛
digitalWrite (motorPin2، LOW)؛
digitalWrite (motorPin3، LOW)؛
digitalWrite (motorPin4، LOW)؛
digitalWrite (motorPin5، LOW)؛
digitalWrite (motorPin6، LOW)؛
digitalWrite (motorPin7، LOW)؛
digitalWrite (motorPin8، LOW)؛
تاخیر (1000);
}
مرحله 4: قطب نما را وصل کنید
این تراشه های قطب نما کوچک هستند، بنابراین لحیم کاری پین ها می تواند ترسناک باشد. من در اینجا از طریق آزمون و خطا و یک انگشت سوخته رفتم، اما از جنبه مثبت می توانم بگویم که اگر تراشه را با لحیم کاری تا حدی ناشیانه خود سرخ نکنم، شانس زیادی برای شما وجود ندارد. بنابراین، به تصویر اول نگاه کنید. این یک راه خوب برای لحیم کردن لیدها است. فقط یک سیم را در سوراخ بچسبانید، آن را به شکل یک حلقه کوچک بچرخانید و یک لحیم کاری بچسبانید. آثار بزرگ.
در ابتدا سعی کردم هدرها را روی آن بچسبانم (تصویر 2 را ببینید). من با مرد به زن می رفتم، اما مرد به مرد تنها چیزی بود که در اطرافم دراز می کشیدم. به هر حال خوب کار نکرد. لحیم کاری هدرها را به تخته متصل نمی کند. احتمالاً لحیم کاری که من داشتم فقط هدرهایی را که داشتم دوست نداشت، اما چسباندن سیم ها و لحیم کردن آنها به قدری خوب کار می کرد که توصیه نمی کنم سعی کنید با هدرها استفاده کنید.
قطب نما شما 4 پین خواهد داشت. GND، VCC، SDA، SDL. آنها برچسب گذاری شده اند، اما برای اشاره به تصاویر من: سفید-قرمز-زرد-سفید = GND-VCC-SDA-SDL. پایه GND را به زمین و پایه VCC را به خروجی 3.3 ولت متصل کنید. اینجاست که داشتن آردوینو خوب است. شما هر دو رگولاتور 3.3 و 5 ولت را دریافت می کنید، و می تواند به راحتی از باتری 9 ولت (محدوده 5-20 ولت، 7-12 ولت توصیه می شود) استفاده کند، که ما در مدت کوتاهی به آن خواهیم رسید. به هر حال، پایه SDA را به پایه آنالوگ A4 (20) و SDL را به پایه A5 (21) متصل کنید. توجه داشته باشید که این تراشه ها به ازای هر 1 درجه شیب حدود 2 درجه دقت را از دست می دهند و بیش از 10 تا 15 درجه شیب غیر قابل اعتماد کار می کنند، بنابراین شما می خواهید آن را صاف نگه دارید. کد را در انتهای این مرحله روی ریزپردازنده خود بارگذاری کنید و رابط سریال را در حالی که وصل است باز کنید (ctrl+shift+M در رابط آردوینو) تا خروجی را بررسی کنید.
برای اینکه به شما کمک کنم اشتباهاتم را تکرار نکنید، میتوانم توصیههای عیبیابی ارائه کنم: اگر هنگام آزمایش تراشه خود جریانی 0.0 درجه دریافت کردید، اتصالات ولتاژ و پایههای زمین را بررسی کنید. اگر اصلاً خروجی دریافت نکردید، پین های SLA و SLD خود را بررسی کنید. به هر حال، در اینجا کدی برای آزمایش قطب نما آمده است: (برای استناد به مقدمه مراجعه کنید، صفحه قطب نما دیجیتال همچنین یک تصویر عالی دارد که بهتر از من نشان می دهد که در صورتی که هنوز گیج هستید، کجا پین های منطقی را وصل کنید.)
#include <Wire.h>
void setup()
{
Serial.begin(9600);
Wire.begin();
}
void loop()
{
Wire.beginTransmission(0x21);
Wire.write ("A");
تاخیر (100);
Wire.requestFrom(0x21, 2);
بایت MSB = Wire.read();
بایت LSB = Wire.read();
Wire.endTransmission();
درجه شناور = ((MSB << 8) + LSB) / 10;
Serial.print(degs);
Serial.println("درجه.");
تاخیر (100);
}
برای جزئیات بیشتر: چگونه یک کمربند قطب نما بازخورد لمسی بسازیم
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
Have you ever wondered how migratory birds manage to have such an amazing sense of direction despite being so generally clueless? They can sense the Earth’s magnetic field with what is basically a compass built into their body. Wouldn’t it be cool to feel what that’s like?
The following instructions are loosely based off of a research paper by the (German) OFFIS Institute of Technology, or Oldenburger Forschungs und Entwicklungsinstitut für Informatik-Werkzeuge und Systeme, if you sprechen sie Deutsch. It can be found here:
http://pielot.org/wp-content/uploads/2011/05/Pielot2011-TactileCompass.pdf
Further thanks go to a couple of guides on how to make simple vibration motor and digital compass circuits, respectively. If my explanations aren’t doing it for you, these probably will for their corresponding aspects of the project:
http://learningaboutelectronics.com/Articles/Vibration-motor-circuit.php
http://www.funnyrobotics.com/2011/03/arduino-with-hmc6352-digital-compass.html
Step 1: Materials
So with the citations out of the way, let’s get started. First, you’ll need a bunch of materials. A lot of these are available easily from Sparkfun, but in many cases more cheaply from Jameco or Digikey or something. Total cost is around $150, largely due to the Arduino or similar, compass chip, motors, and appropriate belt. For this project you will need:
1x: Arduino or homemade ATMega microprocessor board. I recommend an Arduino because it’s difficult to fit voltage regulators, a resonator, etc into a small package by yourself. You’ll need a serial interface too, although a USB cable works fine for an Arduino. I used an Arduino Uno with an ATMega 328p. (~$30)
1x: Honeywell HMC6352 compass chip. (~$35)
1x: Belt. Preferably canvas or fabric, of the boating variety. Leather is really no good for this, and the loop buckles won’t get in the way of the circuit elements like a traditional pin-and-hole buckle might. (~$20)
8x: Vibration motors; I used sparkfun’s #8449, they do well @~3V (~$5 ea.)
8x: 1N4001 diode (cheap)
8x: 0.1uF capacitor (cheap)
8x: 2N2222 Transistor (any NPN will probably work.) (cheap)
8x: 1K resistors (1/4W will be fine, microprocessors output low current.) (cheap)
8x: 33-75ish ohm resistors (33 minimum, I used 47 because I had them lying around.) (cheap)
Some: 9V batteries/clips
A Few: Needles & thread (for sewing circuit elements onto the belt once they’re properly soldered.)
Lots: ~22ga wire, electrical tape, solder.
Optional but recommended: A case/enclosure for your Arduino or microprocessor assembly.
Optional: An on/off switch so that you don’t have to unplug the battery to turn it off.
Note that while I used 8 motors, you can use however many you like; just replace 8 with your number in these instructions, and use 360 / X instead of 45 degree increments in the final code.
Step 2: Build a Motor Assembly
Before starting to work with the actual belt, you’ll probably want to make a prototype using breadboards. The motor assemblies are pretty simple, but you’ll need 8 of them. Each assembly will connect to one of your microprocessor’s digital IO pins, plus a common 5V vcc and ground. You’ll want the assemblies in parallel.
For one assembly, tl;dr refer to the picture. More lengthily, simply connect your desired digital pin to a 1K resistor, and connect that to the B pin of your chosen transistor. The E pin goes to ground, and the C pin is just a bit more complicated. You’ll want it connected to three circuit elements connected in parallel; a diode, a 0.1uF capacitor, and a motor. The motor doesn’t have polarity, and the capacitor is small enough that you don’t have to worry about it. Make sure that the diode’s cathode (the side with the stripe) is facing away from the transistor’s C pin. That’s important, because the diode is there to prevent your motor from drawing too much current and frying the microprocessor. If you do fry your microprocessor, no big deal. Don’t spring for a whole new board, just get another ATMega 168/328 for 5 or 6 bucks and pop it in; sparkfun sells ones with optiboot pre-loaded so you won’t even need a real serial interfacing board. Finally, connect your small-ohm (33-75ish) resistor to the diode’s cathode (and the motor/capacitor by extension), and hook that up to the 5V out. See the picture for details. Refer to your chosen transistor’s data sheet to determine which pin is which.
That’s it! Run a simple test to make sure that everything is hooked up correctly. Note that the motors I recommended have tiny leads, so if you want to plug them into a breadboard you’ll really want to solder a short slip of 22ga wire to each one to ensure that they make consistent contact.
Motor test code (for Arduino or microprocessor board w/ Arduino optiboot):
const int motorPin = <your pin #>;
void setup()
{
pinMode(motorPin, OUTPUT);
}
void loop()
{
// Turn on for 2 seconds, then off for 1 second.
digitalWrite(motorPin, HIGH);
delay(2000);
digitalWrite(motorPin, LOW);
delay(1000);
}
Step 3: Build More Motor Assemblies
This step is pretty short in writing, but it’ll take a bit of time and patience. Now you need to build 7 more motor assemblies and hook them all up for a total of 8 digital IO pins. Your voltage and ground wires should be shared among the assemblies; just use the +/- columns if you have a breadboard to make it easier on yourself. Once you’re done, it should look something like the picture, except with 8 motors instead of 4. I used two breadboards with 4 on each. I only took a picture of one though, sorry. Each yellow wire should go to its own digital pin on the Arduino, the red/white to 5V/Ground.
I’m pretty sure you could get away with using just one diode/capacitor if you hooked it up right, but this makes the wiring easier and they’re really cheap anyways. Don’t forget to test all of the motors. Since they’re in parallel, one failure won’t cause the whole thing to stop working, which makes troubleshooting very easy. Plug them all in, and just add 7 more pins to the sample code from the previous step. For each one you need to define it, set the mode to output, and tell it to turn on and off:
// I used pins 2-9, you may have different ones.
const int motorPin = 2;
const int motorPin2 = 3;
const int motorPin3 = 4;
const int motorPin4 = 5;
const int motorPin5 = 6;
const int motorPin6 = 7;
const int motorPin7 = 8;
const int motorPin8 = 9;
void setup()
{
pinMode(motorPin, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
pinMode(motorPin5, OUTPUT);
pinMode(motorPin6, OUTPUT);
pinMode(motorPin7, OUTPUT);
pinMode(motorPin8, OUTPUT);
}
void loop()
{
// Turn each pin on for 2 seconds, then off for 1.
digitalWrite(motorPin, HIGH);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, HIGH);
digitalWrite(motorPin5, HIGH);
digitalWrite(motorPin6, HIGH);
digitalWrite(motorPin7, HIGH);
digitalWrite(motorPin8, HIGH);
delay(2000);
digitalWrite(motorPin, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
digitalWrite(motorPin5, LOW);
digitalWrite(motorPin6, LOW);
digitalWrite(motorPin7, LOW);
digitalWrite(motorPin8, LOW);
delay(1000);
}
Step 4: Hook Up the Compass
These compass chips are tiny, so soldering the pins can be intimidating. I went through some trial and error here and a burnt finger, but on the upside I can say that if I didn’t fry the chip with my somewhat clumsy soldering, there’s not much chance that you will. So, look at the first picture. This is a good way to solder the leads on. Just stick a wire in the hole, twist it into a little loop, and apply a dab of solder. Works great.
At first, I tried to stick headers on (see image 2). I would have gone with male-to-female, but male-to-male were all I had lying around. Anyways, it did not work well. The solder would not bind the headers to the board. Probably the solder I had just didn’t like the headers I had, but sticking the wires in and soldering them worked so well that I don’t recommend trying to go with headers.
Your compass will have 4 pins; GND, VCC, SDA, SDL. They’re labeled, but for reference to my pictures: white-red-yellow-white = GND-VCC-SDA-SDL. Hook the GND pin up to ground, and the VCC pin to a 3.3V out. This is where having the arduino is nice; you get both 3.3 and 5V regulators onboard, and it can easily run off of a 9V battery (5-20V range, 7-12V recommended), which we’ll get to in a bit. Anyways, hook the SDA pin up to analog pin A4 (20), and the SDL up to pin A5 (21). Note that these chips lose about 2 degrees of accuracy for every 1 degree of tilt and work unreliably beyond 10-15 degrees of tilt, so you’ll want to keep it flat. Load the code at the end of this step onto your microprocessor and open the serial interface while it’s plugged in (ctrl+shift+M in the Arduino interface) to check the output.
In the interest of helping you not repeat my mistakes, I can offer some troubleshooting advice: if, when testing your chip, you get a stream of 0.0 degrees, check your voltage and ground pins’ connections. If you don’t get any output at all, check your SLA and SLD pins. Anyways, here’s the code to test your compass: (see the intro for citation, the digital compass page also has a great image showing better than I could where to connect the logic pins if you’re still confused.)
#include <Wire.h>
void setup()
{
Serial.begin(9600);
Wire.begin();
}
void loop()
{
Wire.beginTransmission(0x21);
Wire.write(“A”);
delay(100);
Wire.requestFrom(0x21, 2);
byte MSB = Wire.read();
byte LSB = Wire.read();
Wire.endTransmission();
float degs = ((MSB << 8) + LSB) / 10;
Serial.print(degs);
Serial.println(” degrees.”);
delay(100);
}
For more detail: How to Make a Tactile Feedback Compass Belt
[/membership]