

اخیراً Stampede 2wd 7 ساله ام را که در سال 1996 طراحی شده بود پاک کردم. آن را برای تولد 8 سالگی ام گرفتم. کامیون عالی بود، اما چند نکته داشت. به عنوان مثال، اگر کامیون از برد خارج شود، باتری کم باشد، یا باتری های فرستنده روی شما بمیرند، کامیون دریچه گاز را در آخرین موقعیت نگه می دارد. به لطف این کروز تصادفی (خارج از کنترل) (ببینید آنجا چه کار کردم؟ 0_o)، به طور تصادفی کامیونم را وارد دریاچه ای در حیاط خلوت خود کردم!
کامیونهای جدید دارای برخی ویژگیهای ایمنی هستند یا میتوانید قطعات اضافی برای کامیون خود تهیه کنید. با این حال، من تصمیم گرفتم از یک آردوینو استفاده کنم تا یک کامیون کمکی کامپیوتری نهایی بسازم، که دارای بسیاری از ویژگی های کامیون جدیدتر است. به عنوان مثال، روشنایی چشمک زن یا ثابت، قطع ولتاژ پایین، حالت های آموزشی (سرعت محدود)، حفاظت از افت سیگنال (موتور را در صورت از دست دادن سیگنال قطع می کند.) این لیست همچنان ادامه دارد!
پس از مطالعه عملکرد داخلی کامیون، بسیار ساده است، و برای یک آردوینو بسیار دعوت کننده است! هر کانال یک سروو را کنترل می کند که با ولتاژ 5 ولت کار می کند، ولتاژ مورد علاقه آردوینو! سرووها از PWM خارج می شوند، به راحتی توسط آردوینو تفسیر و کنترل می شوند! تا کنون، این تنها ویدیویی است که از این وسیله نقلیه دارم: ترمزهای ضد قفل، و تله متری LCD!

مرحله 1: مواد!

حداقل برای این ساخت بسیار ساده است!
شما نیاز دارید:
کامیون/خودروی
آردوینو شما، من یک dumilinove را انتخاب کردم.
کانکتور سروو مادگی 3 پین (مانند یک سروو معمولی)
تخته نان یا پروتوشیلد اختیاری.
مرحله 2: راه اندازی!
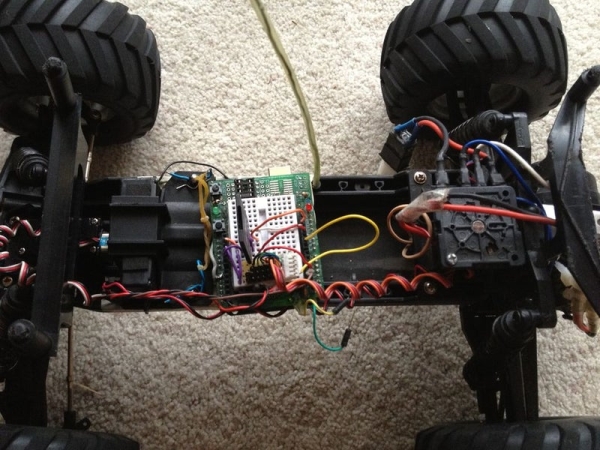
اتصال آردوینو به کامیون بسیار ساده است. گیرنده RC 5 ولت و سیگنال سروو PWM خروجی می دهد. با استفاده از سیم سروو 3 پین، می توانید انتهای سیم خالی را به آردوینو وصل کنید، زمین به زمین می رود، 5 ولت به 5 ولت در آردوینو می رود، سیگنال به هر کدام می رود. پین دیجیتال در آردوینو تاداا! حالا کابل ESC را به همین ترتیب وصل کنید و حتما از پین دیجیتال استفاده کنید.
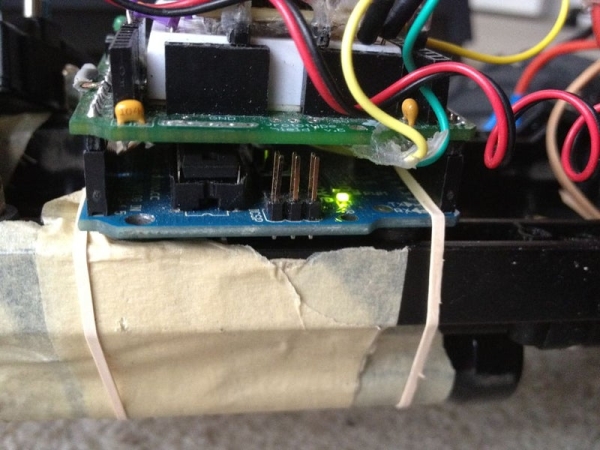
در مورد نصب آردوینو به کامیون، توصیه می کنم از نوعی محفظه پلاستیکی برای درزگیری آب، گرد و غبار و کثیفی استفاده کنید. برای نمونه سازی، از سخت افزار منبع باز، RUBBER ANDS استفاده کردم!
مرحله 3: خواندن سروو! با قطع سیگنال!

خواندن سیگنالهای سروو که از گیرنده RC شما خارج میشوند، ساده است.. ish...
با استفاده از pulseIn()، میتوانید مدت زمان خروج پالس از گیرنده را تعیین کنید. با استفاده از خروجی سیگنال های سروو آردوینو، توانستم خوانش ها را کالیبره کنم.
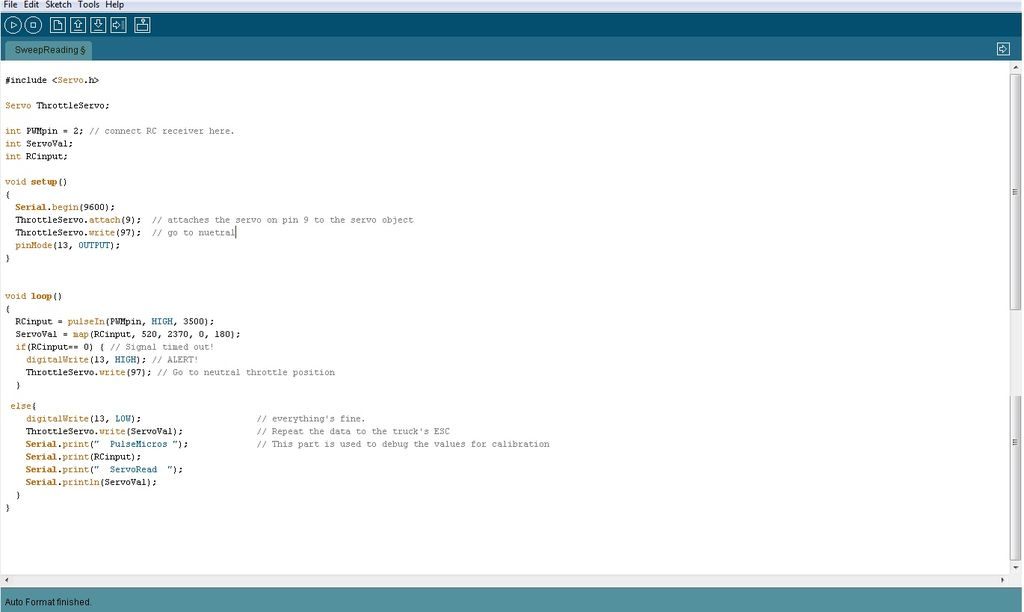
این کد برای خواندن سیگنال است. توجه داشته باشید، 520 و 2370 مقادیر میکروثانیه ای هستند که برای کالیبره کردن قرائت ها استفاده می شوند. من از خروجی Servo Library آردوینو برای کالیبره کردن آن استفاده کردم و به خوبی کار کرد. PWMpin یک ورودی از گیرنده RC است. 20000 یک مقدار میکروثانیه است که به عنوان یک ویژگی زمان استفاده می شود. اگر به محدودیت زمانی رسیده باشد، می دانیم که سیگنالی از فرستنده دریافت نمی کنیم و بعداً می توانیم از آن برای قطع کردن موتورها استفاده کنیم.
RCinput = pulseIn (PWMpin، HIGH، 20000)؛
ServoVal = نقشه (RCinput, 520, 2370, 0, 180)؛
پس از آن، ما برخی از تجزیه و تحلیل داده ها را انجام می دهیم! توجه داشته باشید، ThrottleServo خروجی ای است که ورودی ESC به یک پین آردوینو متصل می شود. پین 13 یک خروجی است که برای نشان دادن خطا استفاده می شود.
if(RCinput== 0) { // زمان سیگنال تمام شد!
digitalWrite (13، HIGH); // هشدار!
ThrottleServo.write(97); // برو به موقعیت دریچه گاز خنثی
}
}
else{
digitalWrite(13, LOW);
ThrottleServo.write(ServoVal); // داده ها را روی ESC Serial.print کامیون تکرار کنید
(" PulseMicros "); // این قسمت برای اشکال زدایی مقادیر کالیبراسیون
Serial.print(RCinput) استفاده می شود.
Serial.print(" ServoRead ");
Serial.println(ServoVal);
}
مرحله 4: کد نهایی برای قطع سیگنال
#include <Servo.h>
