

همیشه نیاز به اتوماسیون یک فرآیند وجود دارد، خواه یک فرآیند ساده/هیولایی باشد. من ایده انجام این پروژه را از یک چالش ساده که هنگام یافتن روشهایی برای آب/آبیاری قطعه کوچک زمینمان با آن مواجه شدم، به ذهنم رسید. خطوط تامین فعلی و ژنراتورهای پرهزینه (برای راه اندازی پمپ ما) به این مشکل افزوده است.
بنابراین چیزی که ما تصمیم گرفتیم انجام دهیم این است که روشی را بسازیم که استفاده از آن ارزان و آسان باشد، حتی برای یک کارگر. خوب و خوب، ما مونتاژ مکانیکی و درایو تسمه را ساختیم و آن را آزمایش کردیم، و موفقیت آمیز بود.
اما مشکل دیگر این بود که وقتی موتور کار می کرد، یک نفر باید همیشه نزدیک اسکوتر می بود تا دور در دقیقه را کنترل کند و به صورت دستی آن را با استفاده از دریچه گاز تنظیم کند. بنابراین این پروژه توسط ما ساخته شد تا کارگر بتواند RPM مورد نظر خود را تنظیم کند. می خواهد موتور را روشن کند و به کارهای دیگر در مزرعه بپردازد.
راه اندازی شامل موارد زیر است:
- سرعت سنج مبتنی بر IR (برای اندازه گیری RPM).
- یک صفحه کلید برای ورود به دور در دقیقه.
- یک صفحه نمایش LCD برای نمایش RPM نظارت شده و RPM فعلی.
- یک موتور پله ای برای افزایش/کاهش دریچه گاز.
- در نهایت، یک میکروکنترلر برای مدیریت تمام این فرآیندها.
مرحله 1: چیدمان قطعات مورد نیاز
قبلاً، من فقط یک نمای کلی از اجزای سازنده را ارائه دادم.
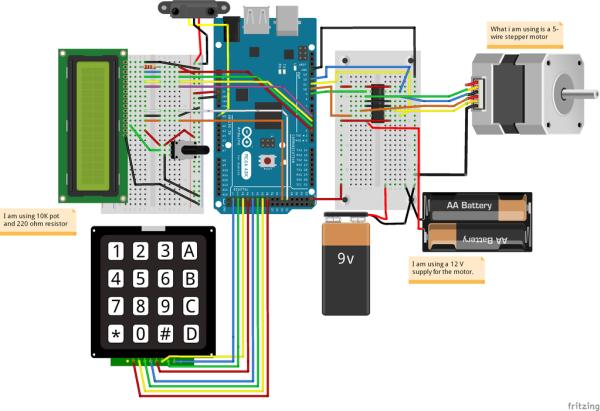
اجزای واقعی مورد نیاز عبارتند از:
- یک میکروکنترلر (من از آردوینو مگا 2560 استفاده کردم).
- یک آی سی درایور موتور L293D (یا یک برد شکستگی این کار را انجام می دهد).
- یک صفحه نمایش ال سی دی ۱۶×۲.
- یک حسگر مادون قرمز/ مجاورت (شماره مدل STL015V1.0_IR_Sensor)
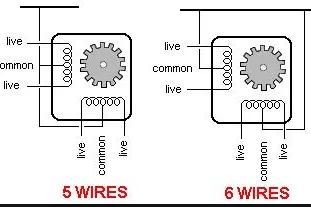
- یک موتور پله ای تک قطبی (من از یک موتور پله ای 5 سیم، 12 ولت استفاده کردم).
- یک صفحه کلید 4×4.
- چند مقاومت 220 اهم، 1000 اهم.
- یک پتانسیومتر 10k.
- سیم های رابط، سیم های رنگی، بریپر.
- تخته های نان.
- یک باتری 12 ولتی برای تغذیه استپر موتور.
- منبع تغذیه 5 ولت برای تغذیه آردوینو.
و این تمام چیزی است که برای شروع نیاز دارید، مردم!
مرحله 2: جریان کلی فرآیند
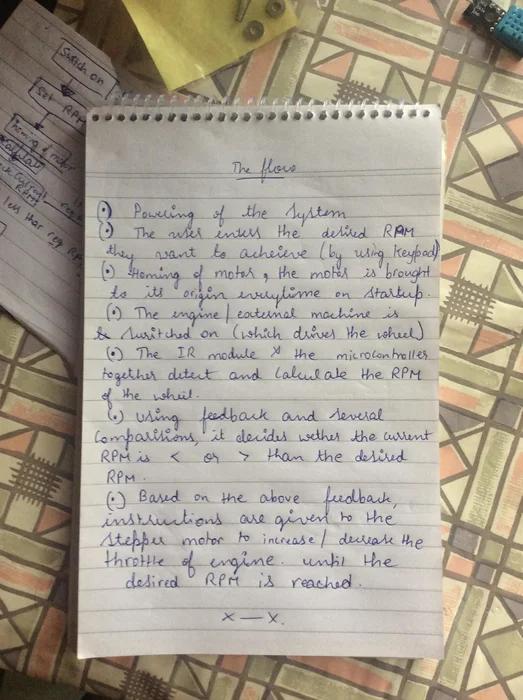
جریان فرآیند به شرح زیر است:
- راهاندازی روشن است و منتظر بمانید تا کالیبراسیون تمام دستگاه انجام شود.
- کاربر باید RPM مورد نیاز را با استفاده از صفحه کلید وارد کند.
- حرکت موتور صورت می گیرد. این معمولاً به گونه ای انجام می شود که یک نقطه مرجع ثابت به موتور دیکته می شود به طوری که وقتی تنظیم روشن می شود، موقعیت اولیه موتور همیشه ثابت است و به عنوان نقطه مرجع در نظر گرفته می شود.
- موتور/هر ماشینی را که باید چرخ را بچرخاند روشن کنید.
- اندازه گیری RPM انجام می شود و روی LCD نمایش داده می شود.
- اینجاست که سیستم بازخورد به تصویر میآید. اگر RPM شناساییشده کمتر از RPM مورد نظر باشد، استپر موتور بهگونهای قدم برمیدارد که دریچه گاز را افزایش میدهد.
- اگر RPM تشخیص داده شده بیشتر از RPM مورد نظر باشد، استپر موتور قدم می گذارد تا دریچه گاز را کاهش دهد.
- این فرآیند تا رسیدن به RPM مورد نظر انجام می شود، هنگامی که به آن رسید، استپر ثابت می ماند.
- کاربر می تواند در صورت لزوم با استفاده از سوئیچ اصلی سیستم را خاموش کند.
مرحله 3: ایجاد اتصالات مورد نیاز
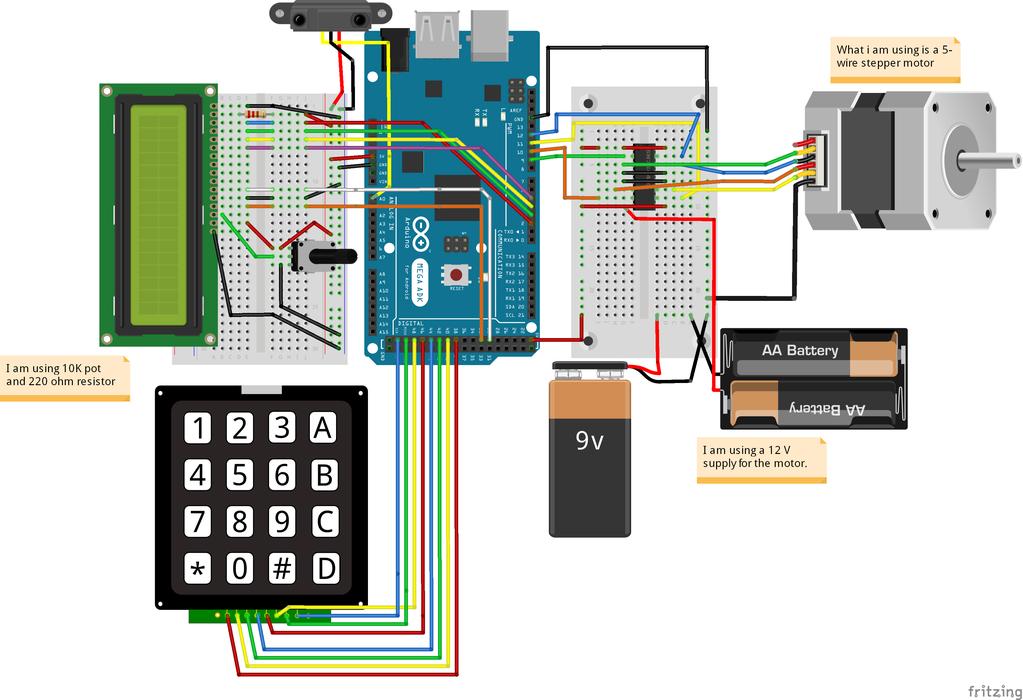
- اتصالات استپر موتور:
از آنجایی که من از یک استپر موتور 5 سیم استفاده می کنم، 4 سیم برای انرژی دادن به سیم پیچ ها و سیم دیگر به زمین وصل است. همیشه لازم نیست که ترتیب خروج 4 سیم از موتور یکسان باشد. به سیم پیچ ها انرژی دهید شما باید به صورت دستی با استفاده از یک مولتی متر سفارش را پیدا کنید ، مگر اینکه به صراحت مشخص شده باشد، یا به برگه اطلاعات موتور خود مراجعه کنید. این 4 سیم به خروجی های آی سی L293D یا درایور موتور شما متصل می شوند .
2. اتصالات برای آی سی L293D :
دلیل اینکه شما از درایور موتور استفاده می کنید این است که موتور پله ای 12 ولت شما نمی تواند به درستی با منبع 5 ولت کار کند و در نهایت برد آردوینو را سرخ می کنید تا منبع تغذیه موتور را پمپ کنید. نمودار پین آی سی را می توانید پیدا کنید. وب چون تقریباً یک آی سی سوئیچینگ استاندارد است. پین ها و اتصالات آنها هستند
- EN1,EN2 : فعال (همیشه بالا یا '1') زیرا یک رمزگشای استاندارد است و معمولا یک ورودی اضافی به نام Enable دارد. خروجی تنها زمانی تولید می شود که ورودی Enable دارای مقدار 1 باشد . در غیر این صورت، همه خروجی ها 0 هستند.
- پین 4،5،12،13: به زمین متصل می شوند.
- پایه 2،7،10،15: آنها پایه های ورودی میکروکنترلر هستند.
- پایه 3،6،11،14: پایه های خروجی هستند که به 4 پایه استپر موتور متصل می شوند.
3. اتصالات به LCD:
ال سی دی دارای 16 پین است که 8 پین آن برای انتقال داده است و در بیشتر مواقع فقط از 8 پین می توانید از 4 پین استفاده کنید. اتصالات عبارتند از:
