کنترل سرعت موتور DC با رابط PC یک پروژه آسان DIY است. در این پروژه سرعت موتور DC با ارسال فرمان از طریق کامپیوتر کنترل می شود. آردوینو مستقیماً از طریق کابل USB به رایانه شخصی متصل می شود و دستور روی نمایشگر سریال آردوینو IDE به آردوینو داده می شود.
موتور به یک ترانزیستور وصل می شود و پایه ترانزیستور به پین PWM آردوینو وصل می شود و سرعت موتورها بر اساس سیگنال PWM که از آردوینو می آید تغییر می کند.
کنترل موتور DC آردوینو - کار می کند
آردوینو از طریق کابل USB به کامپیوتر متصل می شود. میتوانیم دستور را به رایانه شخصی روی مانیتور سریال ارسال کنیم. ما می توانیم سرعت موتور را از 0 به 9 تغییر دهیم. هنگامی که 0 روی مانیتور سریال ارسال می شود، موتور با حداقل سرعت (یعنی صفر) کار می کند. هنگامی که سرعت از 1 تا 9 تغییر می کند، سرعت افزایش می یابد و مقدار 9 به عنوان حداکثر سرعت موتور تنظیم می شود.
برای کنترل سرعت از فناوری کنترل کننده موتور DC PWM استفاده می شود. در PWM، آردوینو یک موج ضربانی می فرستد که شبیه به حالت استیبل آی سی تایمر 555 است.
کنترل سرعت PWM (مدولاسیون عرض پالس)
میکروکنترلر و آردوینو دستگاه های دیجیتالی هستند. آنها نمی توانند خروجی آنالوگ را ارائه دهند. میکروکنترلر صفر و ONE را به عنوان خروجی می دهد که در آن ZERO منطقی LOW و ONE منطقی HIGH است. در مورد ما، ما از نسخه 5 ولتی آردوینو استفاده می کنیم. بنابراین منطقی است که صفر ولتاژ صفر است، و منطقی HIGH 5 ولتاژ است.
خروجی دیجیتال برای دستگاه های دیجیتال خوب است اما گاهی اوقات ما به خروجی آنالوگ نیاز داریم. در چنین حالتی PWM بسیار مفید است. در PWM سیگنال خروجی مانند شکل زیر در فرکانس بالا و ثابت بین صفر و یک سوئیچ می کند.
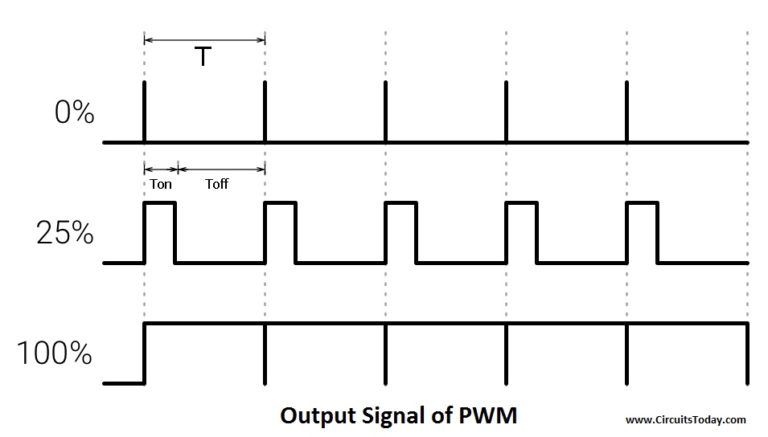
همانطور که در شکل بالا نشان داده شده است، زمان روشن "Ton" و زمان خاموش "Toff" است. T مجموع «تن» و «توف» است که به آن دوره زمانی می گویند. در مفهوم PWM "T" متغیر نیست و "Ton" و "Toff" می توانند متفاوت باشند، به این ترتیب هنگامی که "Ton" افزایش می یابد، "Toff" کاهش می یابد و "Toff" زمانی که "Ton" به طور متناسب کاهش می یابد، افزایش می یابد.
چرخه وظیفه کسری از یک دوره زمانی است. چرخه وظیفه معمولاً به صورت درصد یا نسبت بیان می شود. دوره زمانی است که طول می کشد تا یک سیگنال یک چرخه روشن و خاموش را کامل کند. به عنوان یک فرمول، یک چرخه وظیفه ممکن است به صورت زیر بیان شود:
DUTY CYCLE = (Ton ÷ T) x100 %
اکنون سرعت موتور با توجه به چرخه کاری متفاوت است. فرض کنید کار صفر است، موتور کار نمی کند و زمانی که چرخه کار 100٪ است، موتور در حداکثر RPM حرکت می کند. اما این مفهوم همیشه درست نیست زیرا موتور پس از دادن مقداری ولتاژ ثابت شروع به کار می کند که به آن ولتاژ آستانه می گویند.
ترانزیستور (2N2222)
میکروکنترلر و آردوینو می توانند سیگنال ها را پردازش کنند و تقریباً 20 تا 40 میلی آمپر جریان مصرف می کنند، اما موتورها به جریان و ولتاژ بالایی نیاز دارند، بنابراین ما از ترانزیستور برای حرکت موتور استفاده می کنیم. ترانزیستور به صورت سری با موتور و پایه ترانزیستور از طریق یک مقاومت به پایه PWM آردوینو متصل می شود. سیگنال PWM از آردوینو می آید و ترانزیستور به عنوان یک سوئیچ کار می کند و هنگامی که سیگنال PWM در حالت High است با امیتر (E) و جمع کننده (C) اتصال کوتاه می کند و معمولاً وقتی سیگنال PWM در حالت LOW است باز می شود. این فرآیند به طور مداوم کار می کند و موتورها با سرعت دلخواه کار می کنند.
اجزاء
| اجزاء | مشخصات | تعداد |
|---|---|---|
| آردوینو | نانو | 1 |
| موتور DC | کم قدرت | 1 |
| ترانزیستور | 2N222 | 1 |
| آداپتور برق | 12 ولت | 1 |
| مقاومت | 1K | 1 |
| دیود | 1N4004 | 1 |
| کابل یو اس بی | برای آردوینو نانو | 1 |
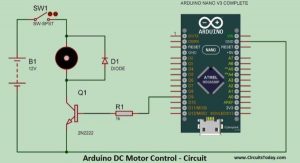
کنترل موتور DC آردوینو – مدار
نمودار مدار در شکل زیر نشان داده شده است. اگر این مدار را بر روی PCB عمومی (ZERO PCB) یا تخته نان برد می سازید، این شکل مفید است.