

در این آموزش قصد داریم یک سروو موتور توسط ARDUINO UNO را کنترل کنیم . سروو موتورها در جاهایی استفاده می شوند که نیاز به حرکت یا موقعیت دقیق شفت وجود دارد. اینها برای برنامه های کاربردی با سرعت بالا پیشنهاد نمی شوند. اینها برای سرعت کم، گشتاور متوسط و کاربرد موقعیت دقیق پیشنهاد می شوند. این موتورها در ماشین های بازوی روباتیک، کنترل پرواز و سیستم های کنترل استفاده می شوند.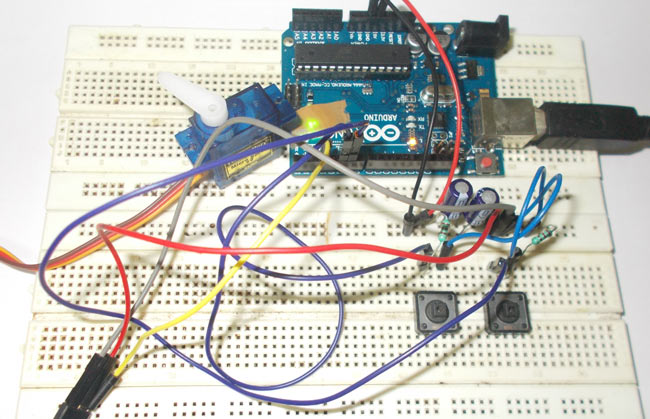
سروو موتورها در اشکال و اندازه های مختلف موجود هستند. یک سروو موتور عمدتاً دارای سیم خواهد بود، یکی برای ولتاژ مثبت، دیگری برای زمین و دیگری برای تنظیم موقعیت است. سیم قرمز به برق، سیم مشکی به زمین و سیم زرد به سیگنال متصل است.

سروو موتور ترکیبی از موتور DC، سیستم کنترل موقعیت، چرخ دنده است. موقعیت شفت موتور DC توسط الکترونیک کنترل در سروو بر اساس نسبت وظیفه سیگنال PWM پین SIGNAL تنظیم می شود.
به زبان ساده، الکترونیک کنترل موقعیت شفت را با کنترل موتور DC تنظیم می کند. این اطلاعات مربوط به موقعیت شفت از طریق پین SIGNAL ارسال می شود. داده های موقعیت به کنترل باید به صورت سیگنال PWM از طریق پین سیگنال سروو موتور ارسال شود.
فرکانس سیگنال PWM (مدول شده با عرض پالس) می تواند بر اساس نوع سروو موتور متفاوت باشد. نکته مهم در اینجا DUTY RATIO سیگنال PWM است. بر اساس این DUTY RATION، الکترونیک کنترل شفت را تنظیم می کند.
همانطور که در شکل زیر نشان داده شده است، برای اینکه شفت به ساعت 9o منتقل شود، نسبت روشن کردن باید 1/18 باشد. 1 میلی ثانیه زمان روشن و 17 میلی ثانیه زمان خاموش در سیگنال 18 میلی ثانیه.
برای جابجایی شفت به ساعت 12 درجه، زمان ON سیگنال باید 1.5ms و زمان OFF باید 16.5ms باشد. این نسبت توسط سیستم کنترل در سروو رمزگشایی می شود و بر اساس آن موقعیت را تنظیم می کند. این PWM در اینجا با استفاده از ARDUINO UNO تولید می شود.
اجزای مدار
سخت افزار: ARDUINO UNO، منبع تغذیه (5v)، خازن 100uF، دکمه ها (دو قطعه)، مقاومت 1KΩ (دو قطعه)، موتور سروو (که نیاز به آزمایش داشت).
نرم افزار: arduino IDE (Arduino nightly).
بیشتر بخوانید: کنترل سروو موتور با استفاده از آردوینو
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
In this tutorial we are going to control a servo motor by ARDUINO UNO. Servo Motors are used where there is a need for accurate shaft movement or position. These are not proposed for high speed applications. These are proposed for low speed, medium torque and accurate position application. These motors are used in robotic arm machines, flight controls and control systems.
