

بیایید با یک آموزش جالب دیگر شروع کنیم. در این آموزش نحوه کنترل موقعیت سروو موتور با استفاده از شتاب سنج با NodeMCU را خواهیم آموخت.
مرحله 1: چیزهایی که باید جمع آوری شوند
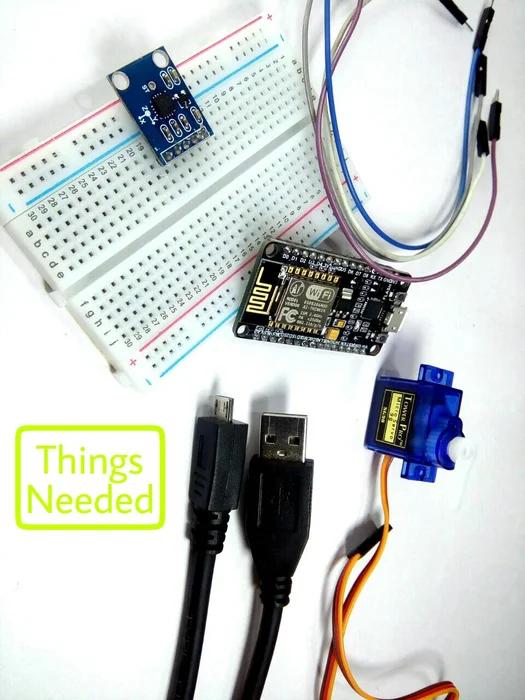
برای شروع با این دستورالعمل تنها چیزی که نیاز دارید این است:
نیاز سخت افزاری
- ADXL335: سنسور شتاب سنج
- NodeMCU
- سروو موتور
- سیم های اتصال (اختیاری)
- تخته نان
- سیم های جامپر
- کابل Micro USB
نرم افزار مورد نیاز
- آردوینو IDE
مرحله 2: توضیحات

سروو موتورها دستگاه های فوق العاده ای هستند که می توانند به یک موقعیت مشخص تبدیل شوند.
معمولاً آنها یک بازوی سروو دارند که می تواند 180 درجه بچرخد. با استفاده از NodeMCU، یک سروو را برای رفتن به یک موقعیت مشخص کنترل می کنیم. به همین سادگی!
ADXL335 دستگاه سازگار با 3 ولت است. برای هر محور سه خروجی دارد، یعنی X، Y و Z اینها خروجی های آنالوگ هستند.
در Instructable های قبلی من، نحوه اتصال سروو موتور و سپس نحوه چرخاندن آن در موقعیت های مختلف و نحوه اتصال شتاب سنج را مشاهده کرده اید.
اگر Instructable قبلی من را ندیدید، می توانید روی پیوند زیر کلیک کنید تا آن Instructable ها را بررسی کنید.
رابط سروو موتور با NodeMCU توسط TheCircuit
شتاب سنج رابط با NodeMCU توسط TheCircuit
مرحله 3: اتصالات مدار
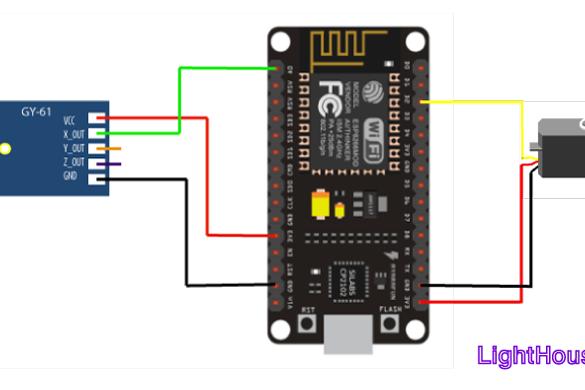
اتصال به سروو
سیم نارنجی به پین دیجیتال D2 متصل می شود .
