

اول : من می دانم... ما با تصویر موتور زیاده روی کردیم.
در مقاله های قبلی به نحوه کنترل موتورها با ترانزیستورهای ساده پرداختیم . و ... با PWM می توانید سرعت را کنترل کنید. اما این فقط یک موتور است و شما فقط می توانید یک جهت بروید. امروز قصد داریم در مورد درایور دو موتوره TB6612FNG، به ویژه برد شکستگی TB6612FNG از sparkfun صحبت کنیم .
TB6612FNG فقط یک درایور دو موتوره نیست، بلکه یک پل H دوگانه است . پل h اساساً مجموعه ای خاص از ترانزیستورها است که به شما امکان می دهد جهت جریان را تغییر دهید . بنابراین به یک موتور متصل است، به این معنی که می توانید آن را در هر دو جهت بچرخانید، و با ورودی PWM ، می توانید از آردوینو خود استفاده کنید تا آنها را با هر سرعتی بچرخانید. از آنجایی که TB6612FNG دارای 2 پل H است، نه تنها می توانید یک ربات را به جلو و عقب برگردانید، بلکه می توانید با چرخش هر چرخ در جهتی متفاوت، بچرخید.
آمار سریع در مورد این مرد : می تواند تا 13 ولت و 1.2 آمپر (3.2 پیک) را تامین کند.
وصل کردن آن
همانطور که از تصویر می توانید متوجه شوید که این شخص برای اجرای آن به چند پین از آردوینو شما نیاز دارد. و احتمالاً در ابتدا پیچیده به نظر می رسد. اما آنقدرها هم بد نیست. با این حال، اولین چیزی که باید به آن توجه کنید این است که شما به یک منبع تغذیه خارجی برای موتورهای خود نیاز دارید ( TB6612FNG می تواند با 2.5 تا 13 ولت کار کند )، پین 5 ولت در آردوینو نمی تواند انرژی کافی برای درایو 2 موتور را تامین کند، و شما می توانید اگر به آردوینو خود آسیب بزنید.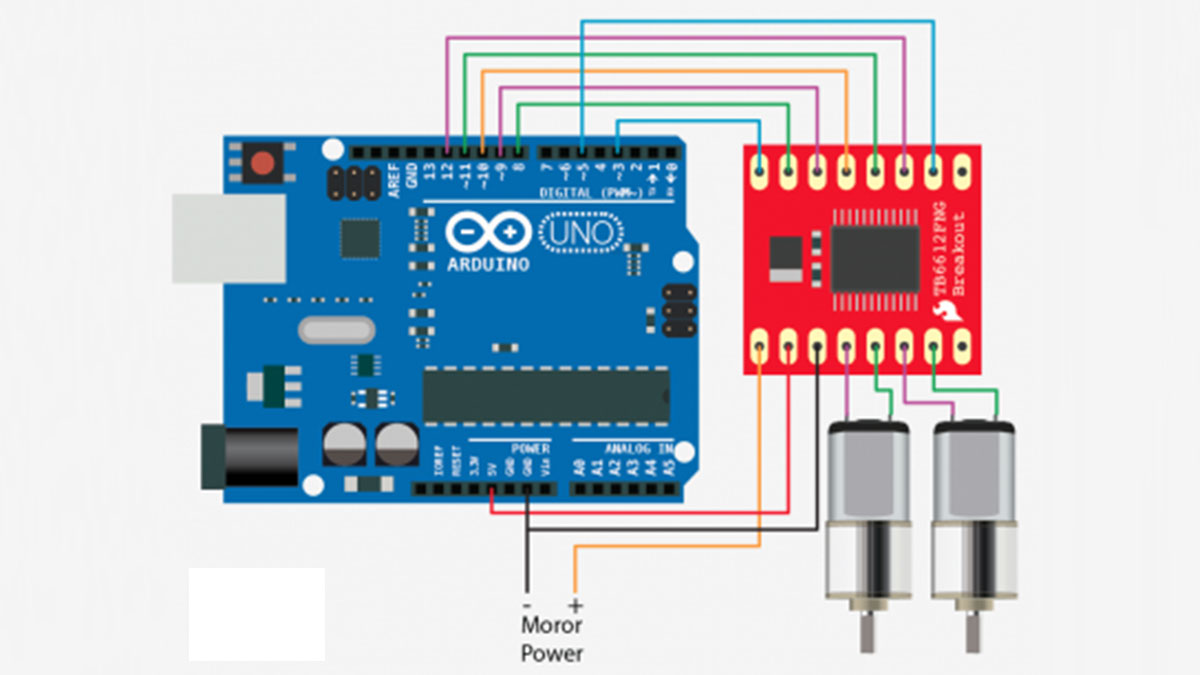
اما اینکه چرا از پین های زیادی استفاده می کند دلایل مختلفی دارد. اول، یک پایه آماده به کار وجود دارد، اگر این پایه پایین نگه داشته شود، موتورها اساسا از برق جدا می شوند. و ... هر موتور همچنین دارای 3 پایه کنترل، 2 برای جهت، و یکی برای سرعت.
برای جزئیات بیشتر: کنترل 2 موتور با TB6612FNG + آردوینو
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
First off: I know… we went overboard with the motor illustration.
In previous articles we have discussed how to control motors with simple transistors. And… with PWM you could control the speed. But that is just one motor, and you can only go one direction. Today we are going to talk about the TB6612FNG dual motor driver, specifically the TB6612FNG breakout board from sparkfun.
The TB6612FNG isn’t just a dual motor driver, it is a dual H-bridge. An h-bridge is basically a specific setup of transistors that allow you to switch direction of current. So hooked up to a motor, that means you can have it spin in both directions, and with PWM input, you can use your arduino to make them spin at any speed. Because the TB6612FNG has 2 H-bridges, you can not only make a robot go forwards and backwards, but also turn around by having each wheel spin in a different direction.
Quick stats on this guy: It is capable of supplying up to 13V and 1.2A (3.2 peak)
Hooking it up
As you can tell from the illustration this guy requires a few pins from your arduino to get it running. And it probably looks complicated at first. But it’s not that bad. The first thing to notice however, is that you do need an external power source for your motors (the TB6612FNG can work with 2.5 to 13v), the 5v pin on the arduino just can not source enough power to drive 2 motors, and you could damage your arduino if you do.
But why it uses so many pins is for several reasons. First, there is a standby pin, if this pin is held LOW, the motors are basically disconnected from power. And… Each motor also has 3 control pins, 2 for direction, and one for speed.
For more detail: Controlling 2 motors with the TB6612FNG + Arduino
