

سخت افزار
کنترل کننده
پلتفرم آردوینو برای این پروژه انتخاب شده است، عمدتاً به دلیل ماهیت نرم افزاری و سخت افزاری باز آن که منجر به در دسترس بودن اطلاعات فنی گسترده شده است. در نتیجه آموزش ها و پروژه های نمونه زیادی برای این پلتفرم موجود است. لیستی از بردهای آردوینو را می توانید در اینجا بیابید . بسیاری از این بردها از جمله آردوینو یونو و آردوینو مگا کاملاً قادر به پرواز با کوادکوپتر هستند. در این پروژه از برد Seeduino سازگار با آردوینو استفاده شده است. به طور خاص، Seeeduino Mega v1.1 عمدتاً از زمانی که در دسترس بود. این یک محدودیت طراحی عمدی بر اساس هدف این پروژه به عنوان یک اجرای آزمایشی برای کلاس آینده کلاس مکاترونیک بود - استفاده از یک کنترلکننده متفاوت، بسیاری از سختافزارهای موجود برای کلاس را منسوخ میکرد.
موتور بدون جارو
بسیاری از دستگاه های الکتریکی مانند خشک کن و فن CPU از موتورهای جریان مستقیم برس دار (DC) استفاده می کنند. آنها را برس دار می نامند زیرا از یک برس کربن برای حفظ جریان در بخش دوار (به نام شفت یا روتور) در داخل موتور استفاده می کنند. ما از چهار موتور DC بدون جاروبک مخصوصاً از این موتور استفاده می کنیم. موتورهای براشلس 10 گرمی براشلس برای این پروژه مناسب تر هستند زیرا دورهای بسیار بالاتری در دقیقه (RPM) ارائه می دهند. از آنجایی که آنها از برس برای رساندن جریان به شفت استفاده نمی کنند، اصطکاک بسیار کمتری وجود دارد. بنابراین، آنها بسیار کارآمدتر هستند و می توانند گشتاور بیشتری تولید کنند. تفاوت هایی بین موتورها وجود دارد، به دنبال توصیه هایی در اینترنت، ما یک موتور اضافی سفارش دادیم و خوشحالیم که این کار را انجام دادیم. تغییر سرعت آزاردهنده بود، اما واقعاً در یکی از تصادفات سود حاصل شد!
کنترل کننده سرعت الکترونیکی (ESC)
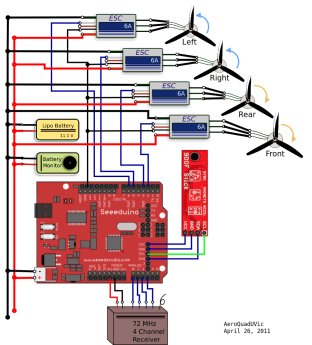
در این پروژه از چهار کنترلر سرعت براشلس 6 آمپر Turnigy پلاسش (Plush 6A) استفاده شده است. پلاس 6A
جهت چرخش
سه سیم موتور براشلس را می توان به هر ترتیبی به سه سیم خروجی کنترلر سرعت متصل کرد. با این حال، معکوس کردن جهت چرخش موتور با تعویض هر دو از این سه سیم انجام می شود . بنابراین، ایده خوبی است که با اتصال موقت سیم ها و بررسی چرخش موتور، نظم درستی پیدا کنید. سیگنال ورودی به موتور بدون جاروبک فقط توانی را که موتور باید در آن کار کند یا RPM آن را مشخص می کند، اما جهت را تعیین نمی کند. سیگنال مورد نیاز ESC معادل سیگنال سروو موتور است. بنابراین از کتابخانه سروو می توان برای راه اندازی ESC با استفاده از برد آردوینو استفاده کرد. تصویر زیر ویژگی های این سیگنال ورودی به ESC را نشان می دهد که توسط یک اسیلوسکوپ گرفته شده است در حالی که موتور براشلس با قدرت 70 درصد کار می کند.
گزارش ساخت کوادکوپتر
این سند تمام تلاش های مرتبطی که در ساخت این کوادکوپتر انجام شده را نشان می دهد. بازه زمانی پروژه از ژانویه 2011 تا آوریل 2011 است.
سخت افزار
کنترل کننده
پلتفرم آردوینو برای این پروژه انتخاب شده است، عمدتاً به دلیل ماهیت نرم افزاری و سخت افزاری باز آن که منجر به در دسترس بودن اطلاعات فنی گسترده شده است. در نتیجه آموزش ها و پروژه های نمونه زیادی برای این پلتفرم موجود است. لیستی از بردهای آردوینو را می توانید در اینجا بیابید . بسیاری از این بردها از جمله آردوینو یونو و آردوینو مگا کاملاً قادر به پرواز با کوادکوپتر هستند. در این پروژه از برد Seeduino سازگار با آردوینو استفاده شده است. به طور خاص، Seeeduino Mega v1.1 عمدتاً از زمانی که در دسترس بود. این یک محدودیت طراحی عمدی بر اساس هدف این پروژه به عنوان یک اجرای آزمایشی برای کلاس آینده کلاس مکاترونیک بود - استفاده از یک کنترلکننده متفاوت، بسیاری از سختافزارهای موجود برای کلاس را منسوخ میکرد.
موتور بدون جارو
بسیاری از دستگاه های الکتریکی مانند خشک کن و فن CPU از موتورهای جریان مستقیم برس دار (DC) استفاده می کنند. آنها را برس دار می نامند زیرا از یک برس کربن برای حفظ جریان در بخش دوار (به نام شفت یا روتور) در داخل موتور استفاده می کنند. ما از چهار موتور DC بدون جاروبک مخصوصاً از این موتور استفاده می کنیم. موتورهای براشلس 10 گرمی براشلس برای این پروژه مناسب تر هستند زیرا دورهای بسیار بالاتری در دقیقه (RPM) ارائه می دهند. از آنجایی که آنها از برس برای رساندن جریان به شفت استفاده نمی کنند، اصطکاک بسیار کمتری وجود دارد. بنابراین، آنها بسیار کارآمدتر هستند و می توانند گشتاور بیشتری تولید کنند. تفاوت هایی بین موتورها وجود دارد، به دنبال توصیه هایی در اینترنت، ما یک موتور اضافی سفارش دادیم و خوشحالیم که این کار را انجام دادیم. تغییر سرعت آزاردهنده بود، اما واقعاً در یکی از تصادفات سود حاصل شد!
کنترل کننده سرعت الکترونیکی (ESC)
در این پروژه از چهار کنترلر سرعت براشلس 6 آمپر Turnigy پلاسش (Plush 6A) استفاده شده است. پلاس 6A
جهت چرخش
سه سیم موتور براشلس را می توان به هر ترتیبی به سه سیم خروجی کنترلر سرعت متصل کرد. با این حال، معکوس کردن جهت چرخش موتور با تعویض هر دو از این سه سیم انجام می شود . بنابراین، ایده خوبی است که با اتصال موقت سیم ها و بررسی چرخش موتور، نظم درستی پیدا کنید. سیگنال ورودی به موتور بدون جاروبک فقط توانی را که موتور باید در آن کار کند یا RPM آن را مشخص می کند، اما جهت را تعیین نمی کند. سیگنال مورد نیاز ESC معادل سیگنال سروو موتور است. بنابراین از کتابخانه سروو می توان برای راه اندازی ESC با استفاده از برد آردوینو استفاده کرد. تصویر زیر مشخصات این سیگنال ورودی به ESC را نشان می دهد که توسط یک اسیلوسکوپ گرفته شده است در حالی که موتور براشلس با 70 درصد قدرت کار می کند.
ویدئوی زیر یک تست ساده از راندن موتور براشلس با ESC را نشان می دهد.
پروانه (سرپایی)
تلاش اولیه برای ملخ یک ملخ دو پره 4.5×4.5E بود. این اندازه بسیار کمتر از اندازه مشخصات موتور توصیه شده در وب سایت تامین کننده است، که برای ملخ 7x5E نامیده می شود. موتورها حتی این ملخ بزرگ را نمی چرخانند، بنابراین فقط می توان نتیجه گرفت که مشخصات وب سایت نادرست است. آزمایش پروانه با اتصال بدنه هواپیما و موتورها به وزنه و قرار دادن این وزنه روی ترازو تکمیل شد. وزن مورد استفاده تقریباً به اندازه قطر برد آردوینو بود، بنابراین ویژگی های جریان هوا باید با وزن هنگام پرواز قابل مقایسه باشد. وزن اولیه بدنه، موتورها، آردوینو، ESCها، مانیتور باتری به اضافه وزن 1763 گرم بود. این مقدار بسیار بالاتر از آن چیزی بود که موتورها میتوانستند آن را بلند کنند، بنابراین کل بالابر به عنوان تفاوت بین وزن اولیه (با موتورهای خاموش) و وزن نهایی (با موتورهای با توان کامل) محاسبه شد.
گزارش ساخت کوادکوپتر
این سند تمام تلاش های مرتبطی که در ساخت این کوادکوپتر انجام شده را نشان می دهد. بازه زمانی پروژه از ژانویه 2011 تا آوریل 2011 است.
