

Bosch BNO055 شتابسنجهای سه محوره، ژیروسکوپها و مغناطیسسنجها را ترکیب میکند تا جهتگیری را برای کاربران فراهم کند.
درباره سنسور
BNO055 از سه حسگر سه محوره برای اندازه گیری همزمان شتاب مماسی (از طریق شتاب سنج)، شتاب چرخشی (از طریق ژیروسکوپ) و قدرت میدان مغناطیسی محلی (از طریق مغناطیس سنج) استفاده می کند. سپس داده ها را می توان به یک ریزپردازنده خارجی فرستاد یا در داخل حسگر با یک ریزپردازنده M0+ که یک الگوریتم فیوژن اختصاصی اجرا می کند، تجزیه و تحلیل کرد. سپس کاربران این امکان را دارند که دادهها را در قالبهای مختلف از حسگر درخواست کنند.
این تراشه همچنین دارای یک وقفه است که می تواند میکروکنترلر میزبان را در صورت وقوع حرکت خاصی (تغییر جهت، شتاب ناگهانی و غیره) مطلع کند.
سنسور باید قبل از استفاده کالیبره شود و یک رجیستر خواندن وضعیت کالیبراسیون فعلی را نگه می دارد. پس از کالیبره شدن، می توان انحرافات کالیبراسیون را روی سنسور نوشت و سپس حسگر بلافاصله آماده استفاده در دفعه بعد که روشن شد، می شود.
یک میکروکنترلر میزبان میتواند تمام یا هر یک از دادهها را از حسگرها (شتابسنج، ژیروسکوپ، و/یا مغناطیسسنج) در حالت غیر همجوشی درخواست کند و میتواند جهت مطلق و نسبی (زاویهها یا کواترنیونها) را در حالت فیوژن درخواست کند .
سنسور می تواند شتاب را بر حسب m/s² یا میلی گرم (
) قدرت میدان مغناطیسی بر حسب mT. داده های ژیروسکوپ بر حسب درجه یا رادیان در ثانیه (به ترتیب DPS و RPS)، زوایای اویلر بر حسب درجه یا رادیان، یا کواترنیون. و دما بر حسب درجه سانتیگراد یا درجه فارنهایت. همه گزینه ها در رجیستر unit_selection تنظیم شده اند (جدول 3-11 در صفحه داده ، صفحه PDF 30).
زوایای اویلر در مقابل کواترنیون ها
اگر در حال طراحی یک راه حل حسگر برای سیستمی هستید که دامنه حرکتی محدودی دارد، می توانید از زوایای اویلر استفاده کنید. اما اگر در حال طراحی سنسوری هستید که بتواند در هر نقطه از فضا جهت گیری کند، باید از کواترنیون ها استفاده کنید.
اویلر آنگلز
زوایای اویلر امکان تجسم ساده اجسامی را فراهم می کند که سه بار حول محورهای عمود بر هم می چرخند (xyx، xzx، yxy، yzy، zxz، zyz، xyz، xzy، yxz، yzx، zxy، zyx).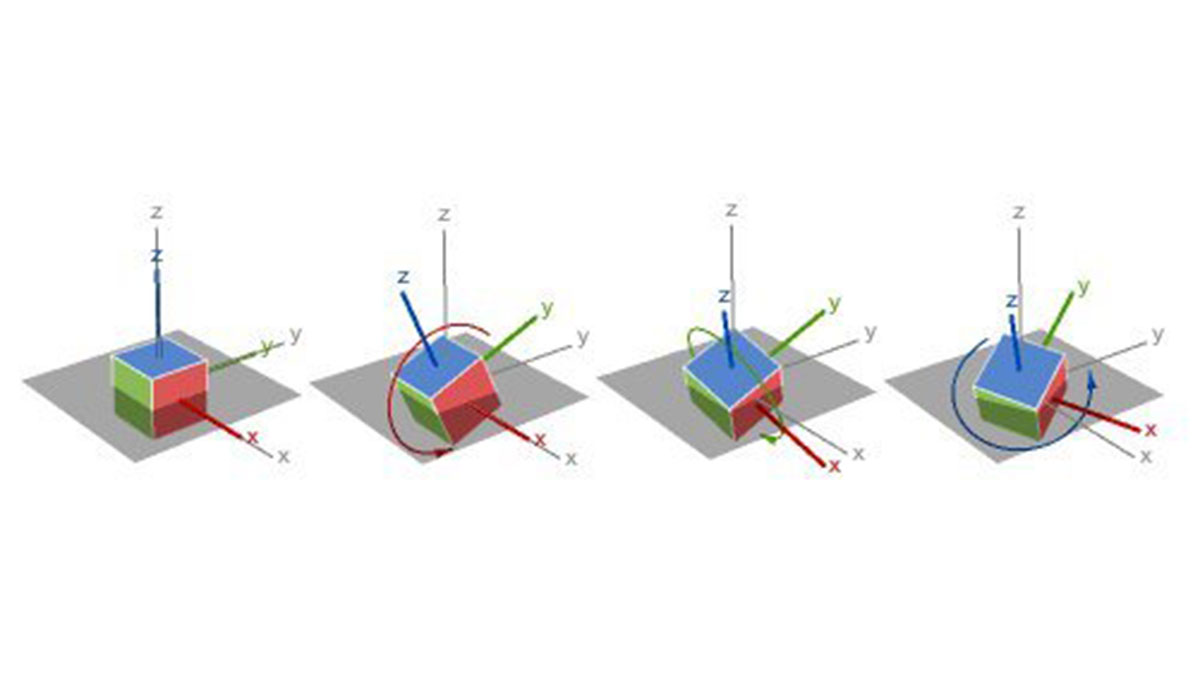
تا زمانی که محورها حداقل تا حدی عمود باشند، کافی هستند. با این حال، با چرخش محورها، زاویه ای وجود دارد که در آن دو محور می توانند چرخش یکسانی را توصیف کنند - شرایطی به نام قفل گیمبال ایجاد می شود. هنگامی که قفل گیمبال رخ می دهد، تغییر جهت بدون مرجع خارجی غیرممکن است. برای کسب اطلاعات بیشتر در مورد قفل گیمبال ، مقاله من را ببینید، در فضای عمیق گم نشوید: درک کواترنیون ها .
برای جزئیات بیشتر: گرفتن داده های IMU با سنسور جهت گیری مطلق BNO055
در ادامه، متن انگلیسی این مطلب را میتوانید مشاهده نمایید:
About the Sensor
The BNO055 uses three triple-axis sensors to simultaneously measure tangential acceleration (via an accelerometer), rotational acceleration (via a gyroscope), and the strength of the local magnetic field (via a magnetometer). Data can then be either sent to an external microprocessor or analyzed inside the sensor with an M0+ microprocessor running a proprietary fusion algorithm. Users then have the option of requesting data from the sensor in a variety of formats.
