

آونگ معکوس یک مسئله کلاسیک در دینامیک و تئوری کنترل است که به طور کلی در دوره های فیزیک یا ریاضی دبیرستان و کارشناسی توضیح داده می شود. من که خودم یک علاقهمند به ریاضیات و علوم بودم، تصمیم گرفتم مفاهیمی را که در طول کلاسهایم یاد گرفتم، برای ساختن یک آونگ معکوس پیادهسازی کنم. به کارگیری چنین مفاهیمی در زندگی واقعی نه تنها به تقویت درک شما از مفاهیم کمک می کند، بلکه شما را در معرض ابعاد کاملا جدیدی از مشکلات و چالش هایی قرار می دهد که با شرایط عملی و واقعی زندگی می کنند که هرگز نمی توان در کلاس های تئوری با آنها مواجه شد.
در این آموزش، ابتدا مسئله آونگ معکوس را معرفی می کنم، سپس جنبه تئوری مسئله را پوشش می دهم و سپس سخت افزار و نرم افزار مورد نیاز برای زنده کردن این مفهوم را مورد بحث قرار می دهم.
پیشنهاد میکنم ویدیویی را که در بالا ضمیمه شده است، در حین مرور آموزش ببینید که درک بهتری به شما میدهد.
و در آخر، لطفاً فراموش نکنید که اگر از این پروژه خوشتان آمد، در «مسابقه علمی کلاس درس» رای بدهید و هر گونه سوالی را در بخش نظرات زیر مطرح کنید. ساخت مبارک!
مرحله 1: مشکل
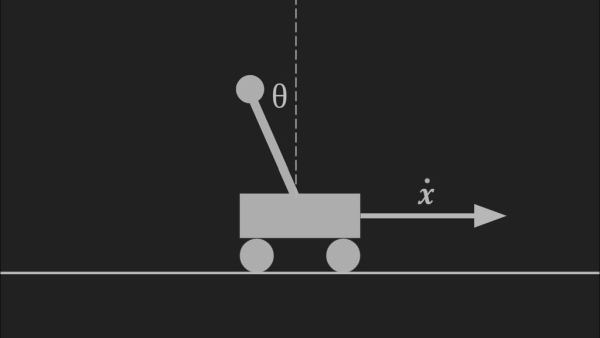
مشکل آونگ معکوس شبیه به تعادل یک جارو یا یک قطب بلند در کف دست است، چیزی که اکثر ما در کودکی آن را امتحان کردهایم. هنگامی که چشمان ما می بینند که قطب به سمت خاصی سقوط می کند، این اطلاعات را به مغز می فرستد که محاسبات خاصی را انجام می دهد و سپس به بازوی شما دستور می دهد تا با سرعت خاصی به موقعیت خاصی حرکت کند تا با حرکت قطب مقابله کند، که امیدواریم این کار باعث شود ستون نوک برگشت به سمت عمودی این فرآیند چندین صد بار در ثانیه تکرار می شود که قطب را کاملا تحت کنترل شما نگه می دارد. آونگ معکوس به روشی مشابه عمل می کند. هدف این است که یک آونگ وارونه روی یک گاری که اجازه حرکت دارد متعادل شود. به جای چشم،
مرحله 2: راه حل
این مشکل متعادل کردن آونگ وارونه مستلزم بینش نسبت به حرکات و نیروهایی است که در این سیستم نقش دارند. در نهایت، این بینش به ما این امکان را میدهد که به «معادلات حرکت» سیستم دست پیدا کنیم که میتواند برای محاسبه روابط بین خروجی که به محرکها میرود و ورودیهای دریافتی از حسگرها استفاده شود.
معادلات حرکت را می توان با توجه به سطح شما به دو صورت استخراج کرد. آنها را می توان با استفاده از قوانین پایه نیوتن و برخی از ریاضیات سطح دبیرستان یا با استفاده از مکانیک لاگرانژی که به طور کلی در دوره های فیزیک در مقطع کارشناسی معرفی می شود، استخراج کرد. (توجه: استخراج معادلات حرکت با استفاده از قوانین نیوتن ساده اما خسته کننده است، در حالی که استفاده از مکانیک لاگرانژی بسیار زیباتر است، اما نیاز به درک مکانیک لاگرانژی دارد، اگرچه هر دو رویکرد در نهایت به یک راه حل منجر می شوند).
هر دو رویکرد و مشتقات رسمی آنها معمولاً در کلاس های دبیرستان یا کارشناسی ریاضی یا فیزیک پوشش داده می شوند، اگرچه می توان آنها را به راحتی با استفاده از یک جستجوی ساده در گوگل یا با مراجعه به این پیوند پیدا کرد . با مشاهده معادلات نهایی حرکت، متوجه یک رابطه بین چهار کمیت می شویم:
- زاویه آونگ نسبت به عمود
- سرعت زاویه ای آونگ
- شتاب زاویه ای آونگ
- شتاب خطی گاری
جایی که سه مورد اول کمیت هایی هستند که قرار است توسط سنسور اندازه گیری شوند و آخرین کمیت برای انجام به محرک ارسال می شود.
مرحله 3: تئوری کنترل
تئوری کنترل زیر شاخه ای از ریاضیات است که به کنترل و راه اندازی سیستم های دینامیکی در فرآیندها و ماشین های مهندسی شده می پردازد. هدف توسعه یک مدل کنترل یا یک حلقه کنترل برای دستیابی به ثبات عمومی است. در مورد ما، آونگ وارونه را متعادل کنید.
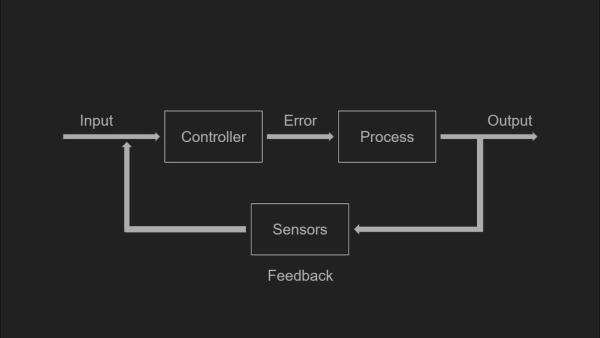
دو نوع اصلی از حلقه های کنترل وجود دارد: کنترل حلقه باز و کنترل حلقه بسته. هنگام اجرای یک کنترل حلقه باز، عمل کنترل یا فرمان کنترل کننده مستقل از خروجی سیستم است. یک مثال خوب از این یک کوره است، که در آن مقدار زمانی که کوره روشن می ماند کاملاً به تایمر بستگی دارد.
در حالی که در یک سیستم حلقه بسته، فرمان کنترل کننده به بازخورد از وضعیت سیستم بستگی دارد. در مورد ما، بازخورد زاویه آونگ با اشاره به نرمال است که سرعت و موقعیت گاری را تعیین می کند، بنابراین این سیستم را به یک سیستم حلقه بسته تبدیل می کند. در بالا یک نمایش بصری به شکل بلوک دیاگرام یک سیستم حلقه بسته پیوست شده است.
چندین تکنیک مکانیسم بازخورد وجود دارد، اما یکی از پرکاربردترین آنها، کنترل کننده تناسبی-انتگرال-مشتق (کنترل کننده PID) است، که همان چیزی است که ما قصد داریم از آن استفاده کنیم.
