با استفاده از آردوینو، بازوی رباتیک چاپ شده سه بعدی را ضبط و پخش کنید
با استفاده از آردوینو، بازوی رباتیک چاپ شده سه بعدی را ضبط و پخش کنید
بازوهای رباتیک در بسیاری از کاربردهایی که سرعت، دقت و ایمنی مورد نیاز است، مفید و کارآمدتر هستند. اما برای من، چیزی بیشتر از این این است که وقتی کار می کنند، دیدن این چیزها جالب است. من همیشه آرزوی داشتن یک بازوی رباتیک را داشتم که می تواند به من در کارهای روزانه ام کمک کند، درست مانند Dum-E و Dum-U که تونی استارک در آزمایشگاه خود از آنها استفاده می کند. این دو ربات در هنگام ساخت لباسهای مرد آهنی یا فیلمبرداری از کارش با استفاده از دوربین فیلمبرداری به او کمک میکنند. در واقع Dum-E نیز یک بار جان خود را نجات داده است. و اینجا جایی است که من می خواهم آن را متوقف کنم زیرا این صفحه طرفدار نیست. به غیر از دنیای خیالی، بازوهای رباتیک بسیار جالب دنیای واقعی ساخته شده توسط Fanuc، Kuka، Denso، ABB، Yaskawa و غیره وجود دارد.
مواد مورد نیاز
آردوینو نانو
سرو موتور 5 MG-995
5-پتانسیومتر
پرف برد
سروو شاخ
مهره و پیچ
توجه : بدنه بازوی رباتیک کاملاً چاپگر سه بعدی است. اگر چاپگر دارید، میتوانید آنها را با استفاده از فایلهای طراحی داده شده چاپ کنید. در غیر این صورت، از مدل سه بعدی ارائه شده استفاده کنید و قطعات خود را با استفاده از چوب یا اکریلیک ماشین کنید. اگر چیزی ندارید، می توانید فقط از مقوا برای ساخت بازوی رباتیک ساده استفاده کنید.
پرینت سه بعدی و مونتاژ بازوی رباتیک
زمان برترین بخش ساخت این بازوی رباتیک، ساخت بدنه آن است. در ابتدا با طراحی بدنه با استفاده از Solidworks شروع کردم، اما بعداً متوجه شدم که طرحهای بسیار جذابی وجود دارد که به راحتی در Thingiverse در دسترس هستند و نیازی به اختراع مجدد چرخ نیست. بنابراین، طرحها را مرور کردم و متوجه شدم که Robotic Arm V2.0 توسط Ashingwill کاملاً با موتورهای سروو MG995 ما کار میکند و دقیقاً با هدف ما مطابقت دارد.
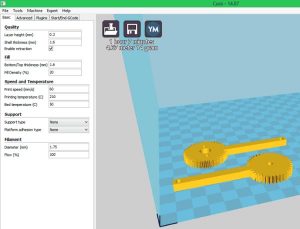
بنابراین به صفحه Thingiverse او (لینک داده شده در بالا) بروید و فایل های مدل را دانلود کنید. در مجموع 14 قسمت وجود دارد که باید پرینت شوند و فایل های STL همه آنها را می توانید از صفحه Thingiverse دانلود کنید. من از نرمافزار Cura 3.2.1 Ultimaker برای برش دادن فایلهای STL و چاپگر سهبعدی رتیل TEVO خود برای چاپ آنها استفاده کردم. اگر می خواهید در مورد چاپگر سه بعدی و نحوه عملکرد آن بیشتر بدانید، می توانید این مقاله را در راهنمای مبتدیان برای شروع چاپ سه بعدی بخوانید.
خوشبختانه هیچ یک از قطعات دارای ساختارهای آویزان نیستند، بنابراین نیازی به تکیه گاه نیست. طراحی بسیار ساده است و از این رو می توان به راحتی توسط هر چاپگر سه بعدی ساده ای کار کرد. تقریباً پس از 4.5 ساعت چاپ، تمام قطعات آماده مونتاژ هستند. دستورالعملهای مونتاژ مجدداً توسط خود Ashing توضیح داده شده است و از این رو من قصد ندارم آن را پوشش دهم.
یک نکته کوچک این است که باید لبههای قطعات را سنباده بزنید تا موتورها در آن قرار بگیرند. صبر داشته باشید و اگر موتورها کمی سفت به نظر می رسند از فایل استفاده کنید تا فضایی برای آنها ایجاد کنید. برای مونتاژ Robotic ARM به 20 عدد پیچ 3 میلی متری نیاز دارید.
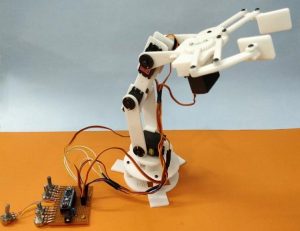
به محض نصب موتور مطمئن شوید که می تواند بچرخد و به مکان های مورد نظر برسد قبل از اینکه آن را برای همیشه پیچ کنید. پس از مونتاژ، می توانید به گسترش سیم های سه سروو موتور بالا ادامه دهید. من از سیم های نری به مادگی برای امتداد دادن آنها و آوردن آن به صفحه مدار استفاده کرده ام. مطمئن شوید که سیمها را بهدرستی مهار کردهاید تا در حین کار کردن بازو به مسیرتان نخورند. هنگامی که بازوی رباتیک من را مونتاژ کردم در تصویر زیر چیزی شبیه به این بود.
مدار
سرو موتورهای MG995 با ولتاژ 5 ولت کار می کنند و برد آردوینو دارای رگولاتور 5 ولتی است. بنابراین ایجاد مدار بسیار آسان است. برای کنترل سروو موتور باید 5 سروو موتور را به پایه های PWM آردوینو و 5 پتانسیومتر را به پایه های آنالوگ آردوینو وصل کنیم. نمودار مدار برای همان در زیر آورده شده است.