کنترل موقعیت با استفاده از وای فای از تلفن هوشمند خیلی خوب به نظر می رسد که درست باشد؟ این کار را با MKR1000 انجام دهید.
موارد استفاده شده در این پروژه
قطعات سخت افزاری |
||||||
 |
|
× | 1 | |||
ابزار دستی و ماشین آلات ساخت |
||||||
 |
|
|||||
داستان
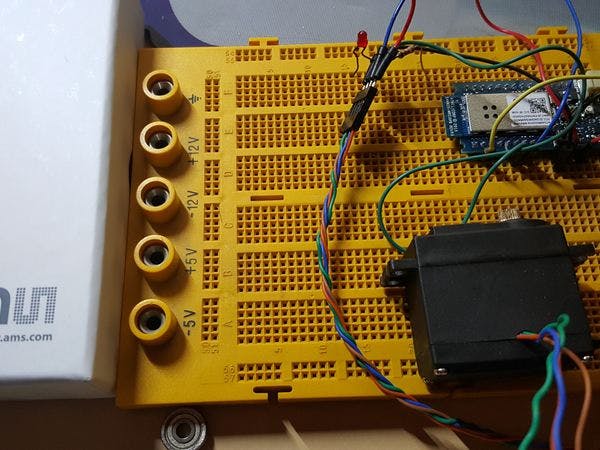
بسیاری از کنترل موقعیت از استپر استفاده می کنند زیرا کار با آنها آسان و ارزان هستند. سرووهای RC نیز آسان و ارزان هستند، اما به نیم چرخش محدود می شوند. سرووهای چرخش مداوم می توانند بیش از نیمی از چرخش را انجام دهند اما ما نمی توانیم موقعیت را کنترل کنیم. این پروژه یک رمزگذار مغناطیسی ارزان قیمت را اضافه می کند که در داخل سروو قرار می گیرد تا حسگر موقعیت را اضافه کند.
این بدان معناست که اکنون یک چرخش منفرد از 4096 پله یا زوایای گسسته تشکیل شده است، اما می توان به هر مقدار دلخواه پیچ یا پله دست یافت. فقط به یاد داشته باشید که این سرووها در هیچ مسابقه سرعتی برنده نمی شوند.
اما برای اینکه پروژه برای بسیاری از ما کمی جالب تر شود، استفاده از MKR1000 به ما اجازه می دهد تا کنترل را به صورت بی سیم نیز انجام دهیم.
من مجموعه ای از دستورات را دارم که هم برای ارتباط USB و هم برای ارتباط UDP از طریق WiFi در دسترس هستند. این بدان معناست که میتوانید نحوه کارکرد آن را با اتصال به USB رایانه خود بیاموزید و آزمایش کنید و بعداً میتوانید ماژول را به مکان دیگری منتقل کنید و به صورت بیسیم به آن دسترسی پیدا کنید.
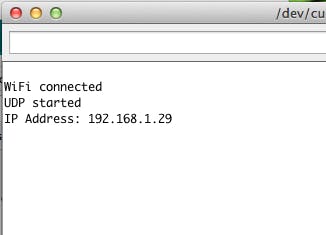
برای ارتباط بی سیم من از پروتکل UDP و پورت 23 استفاده می کنم. آدرس IP دستگاه در ابتدا به ترمینال سریال گزارش می شود تا بتوانید یاد بگیرید که برد از چه IP استفاده می کند. لطفاً به یاد داشته باشید که دو مقدار مهم را در کد منبع وارد کنید: نام شبکه وای فای (SSID) و رمز عبور.
مدار بسیار کوچکی وجود دارد که میتوان آن را روی یک برد آداپتور کوچک SOIC-8 انجام داد تا داخل روده سروو قرار داده شود.

برای دسترسی به کنترلر به صورت بی سیم ابتدا باید آدرس IP آن را بدانیم و برای آن باید از مانیتور سریال Arduino IDE استفاده کنیم: